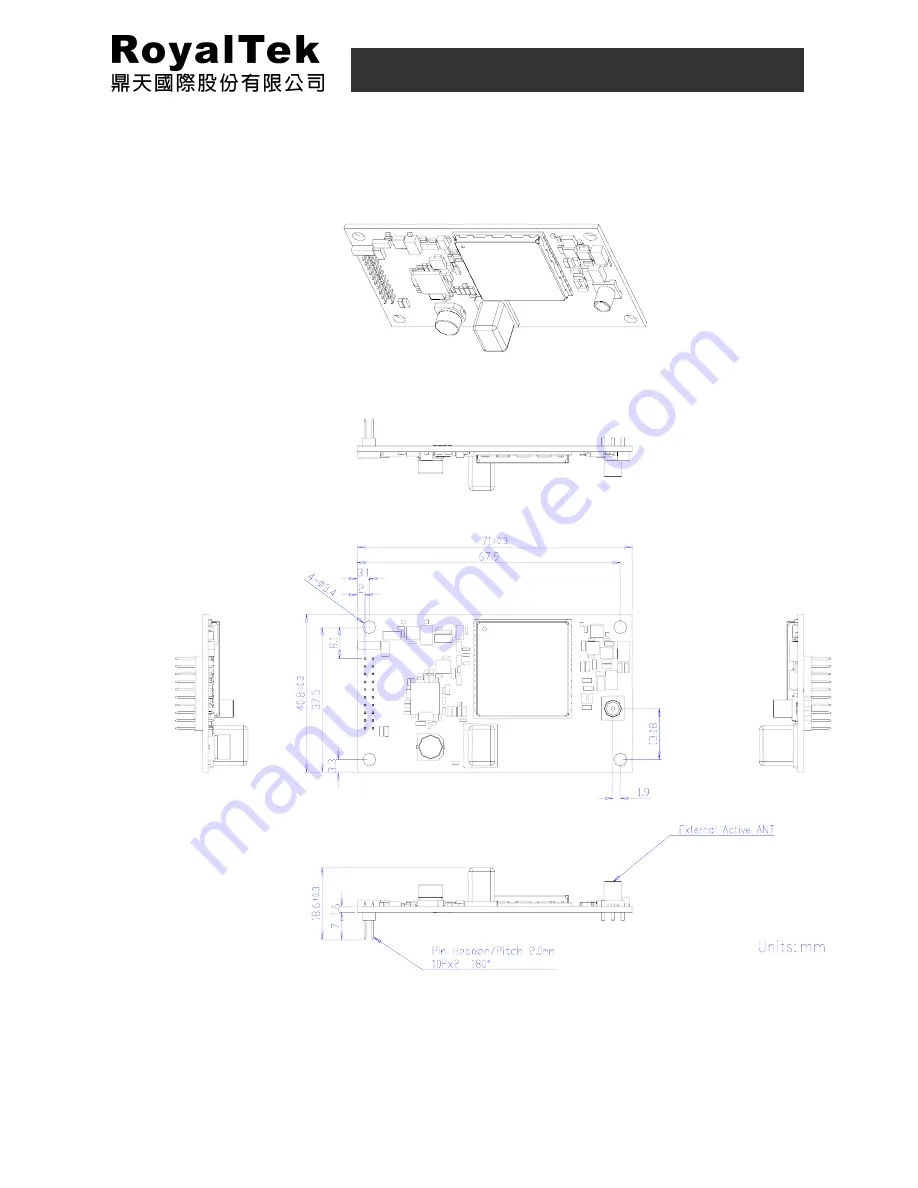
RoyalTek RDR-3100, User Manual
The RoyalTek RDR-3100 user manual is essential for maximizing your experience with this cutting-edge product. Discover step-by-step instructions and in-depth information to unlock the full potential of your device. Download this manual for free at 88.208.23.73:8080 to ensure a seamless and hassle-free user experience.
Share
Download



























Reviews:
No comments
Related manuals for RDR-3100
3
Brand: YELLOWBRICK Pages: 2

Tabs
Brand: Cactus Pages: 17

HI-505SD
Brand: Haicom Pages: 32

Home Monitor
Brand: WatchDog Pages: 2

GPS307
Brand: Zodiak Pages: 23

GA-5626
Brand: G Sat Pages: 28

GeoVision 4466
Brand: Prestigio Pages: 50

GPT-810
Brand: GoPass Pages: 2

GPS-911
Brand: GoPass Pages: 2

GPS III
Brand: Garmin Pages: 112

PLB-110
Brand: Satro Pages: 19

SX550
Brand: SkyCaddie Pages: 32

AgTraX Pro
Brand: GPS Collars Pages: 3

RFG-1000
Brand: RoyalTek Pages: 27

M56 S/Map
Brand: Lowrance Pages: 164

NCZ-3201
Brand: Nyce Control Pages: 5

RF-V16
Brand: Rainbow Star Pages: 5

RAK7200
Brand: RAKwireless Pages: 36





















































