






















ROZUM ROBOTICS
PULSE robotic arm
Page
12 | 23
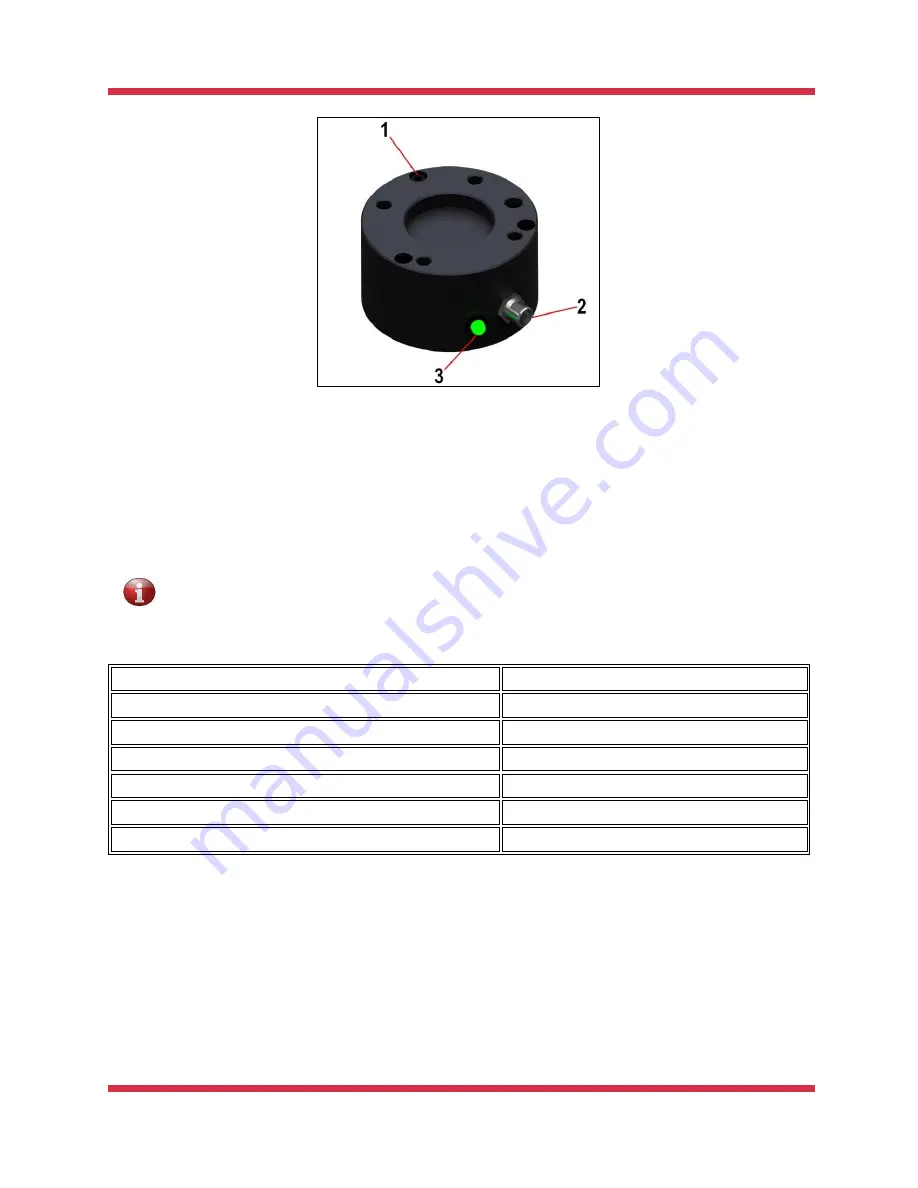
Figure 1-8: The wrist of the PULSE arm
The wrist of the PULSE robotic arm features:
a standard ISO 9409-1-50-4-M6 mechanical interface
(1)
a cable output
(2)
for connecting an end effector electrically
a LED indicator
(3)
When an installation requires a mechanical interface different from the standard ISO
9409-1-50-4-M6 one, the user (integrator) has to provide a proper adaptor for
integrating an end effector.
The states of the wrist LED are as described in Table 1-6.
Arm state
LED signal
Power off
Off (no indication)
Standby mode (freeze state)
Green on
Operation (in motion)
Blinking green
Learn mode
Steady yellow
Error
Steady red
A control button pressed
Blinking color
1.9. Control buttons
For the current robot design (intended for use together with a gripper work tool), control buttons
are located on the elbow fitting above the wrist (see Figure 1-9).
Summary of Contents for Pulse
Page 1: ......







































































