





















ROZUM ROBOTICS
PULSE robotic arm
Page
16 | 23
2.3.1. Power connection
The power connection of the control box is in accordance with the IEC 60320-1 C14 standard.
The
electrical specifications are as indicated in Table 2-1.
Table 2-1: Electrical specifications of the control box power connection
Parameter
Value/ range
Unit
Input voltage
100–264
VAC
Mains frequency
47–63
Hz
Standby power
10
W
Average operating power
400
W
For enhanced safety, consider installing an external mains switch with a fuse.
2.3.3. Digital I/O connectors
The control box has 4 digital inputs and 2 digital outputs that you can use to connect additional
equipment, including sensors, safety devices, PLC, etc. The connectors are located on the back
panel of the control box (see Figure 1-6).
The cable length from the digital inputs/ outputs to connected equipment should not
exceed 2 m. Otherwise, signal quality may suffer.
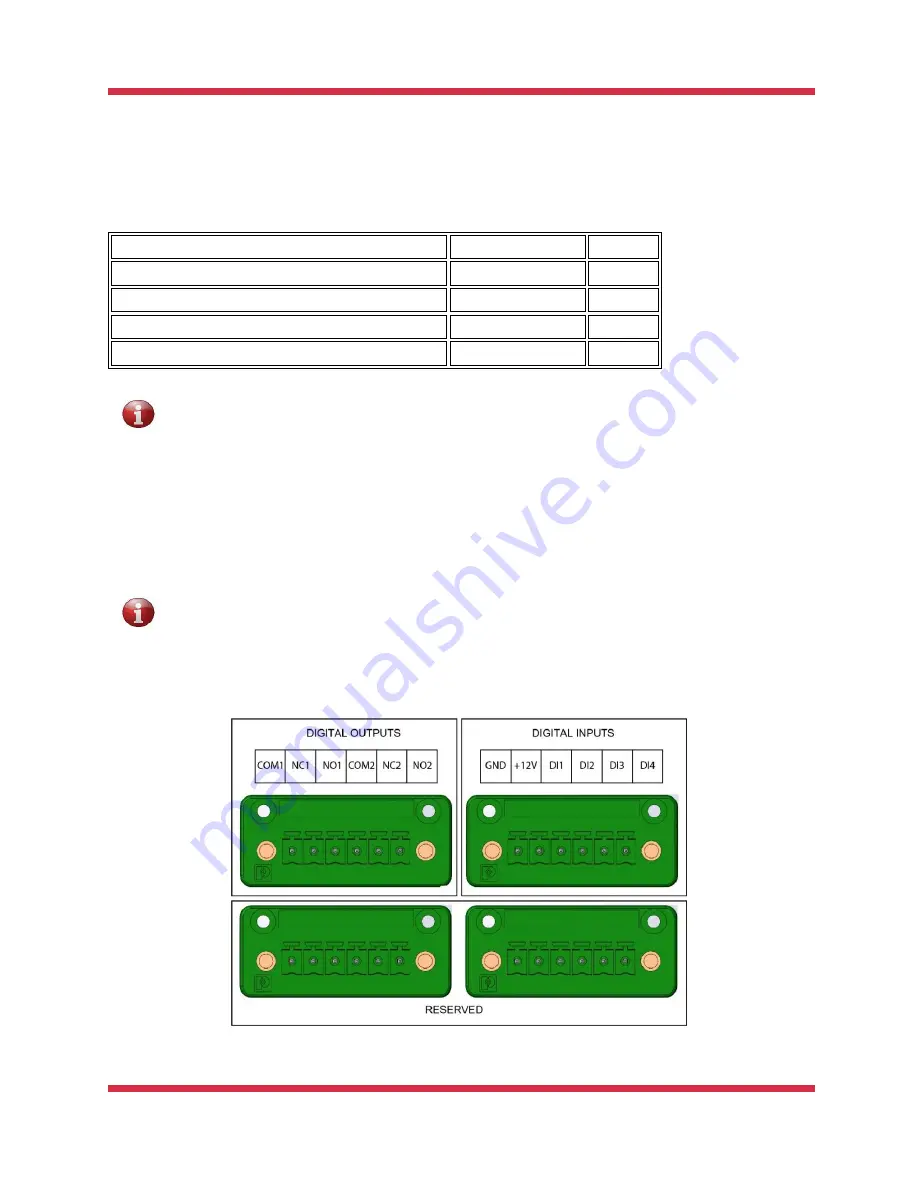
For the current control box configuration, the two lower digital I/O connectors have the
RESERVED status. The pin assignment for the two upper ones is as illustrated in Figure 2-2.
Figure 2-2: Pin assignment for digital I/O connectors
Summary of Contents for Pulse
Page 1: ......







































































