





























ROZUM ROBOTICS
PULSE DESK
Rev. 5, in effect from Q2 2019
Page
16 | 56
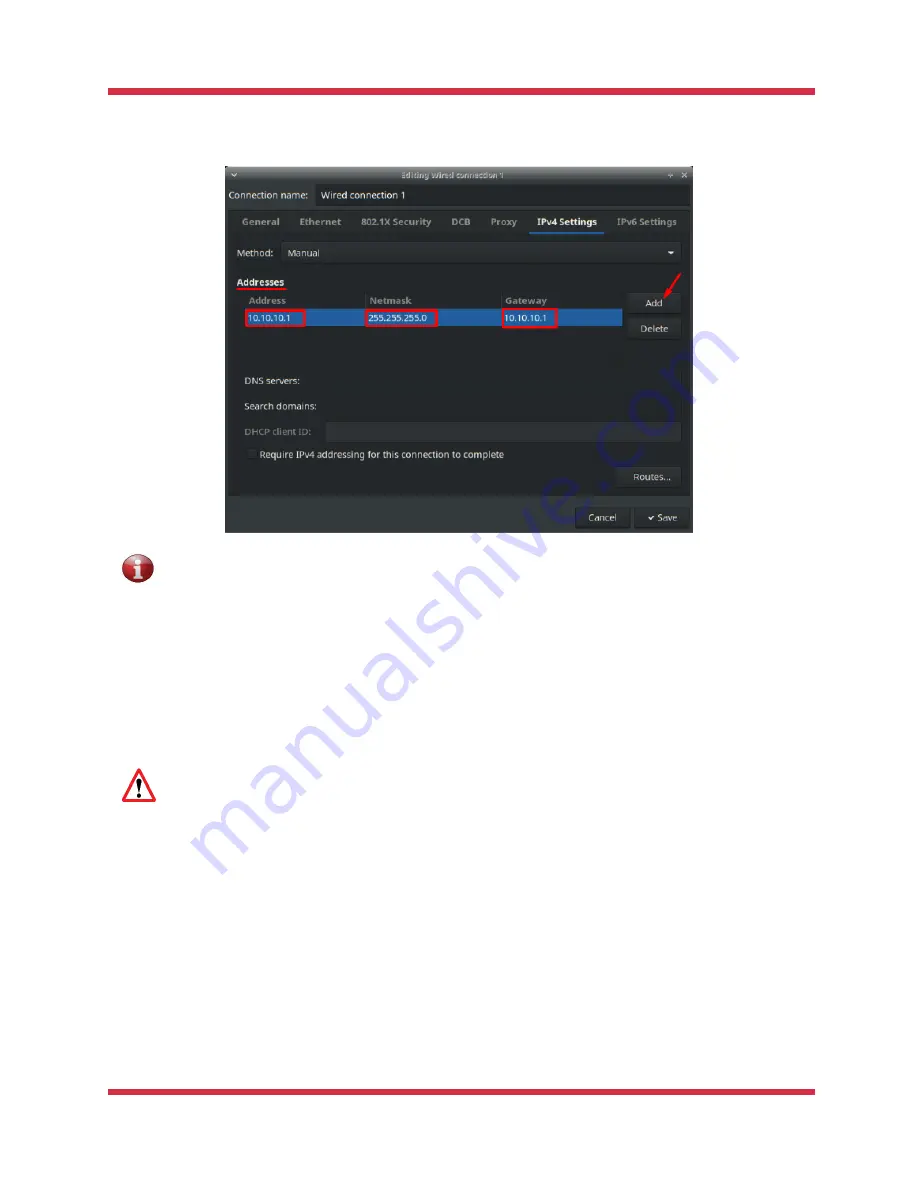
5.
In the
Addresses
area
on the same tab, click
Add
and specify the
Address, Netmask
, and
Gateway
as shown in the figure below.
To specify the last digits in the Gateway and the Address fields, you can use any values
from 1 to 255, except for 20, since 10.10.10.20 is the default static IP of the arm.
6.
Click the
Save
button to confirm the settings.
2.2.2
Dynamic IP
Dynamic IP is the IP address of the PULSE arm assigned to it by the DHCP server in the user
network. To find out the dynamic IP of the robotic arm in your local network, you will need
assistance from the system administrator of the network.
If you fail to find out the dynamic IP address of the arm, check the network connection
settings. The arm may not have received the IP address from the DHCP server within
the period as preset for the network, resulting in a fallback to the static IP 10.10.10.20.
After you have set up communication with the arm, you can proceed to working with the PULSE
DESK interface (see
Section 3
) or REST API (see
Section 5)
.
3
THE PULSE DESK USER INTERFACE
PULSE DESK is a software program that enables operating the PULSE robotic arm together with
an attached work tool. The program is pre-installed on the PC module integrated into the control
box and boots in the course of the control box initialization. Its functionality allows for the
following:
Summary of Contents for Pulse
Page 1: ......







































































