


















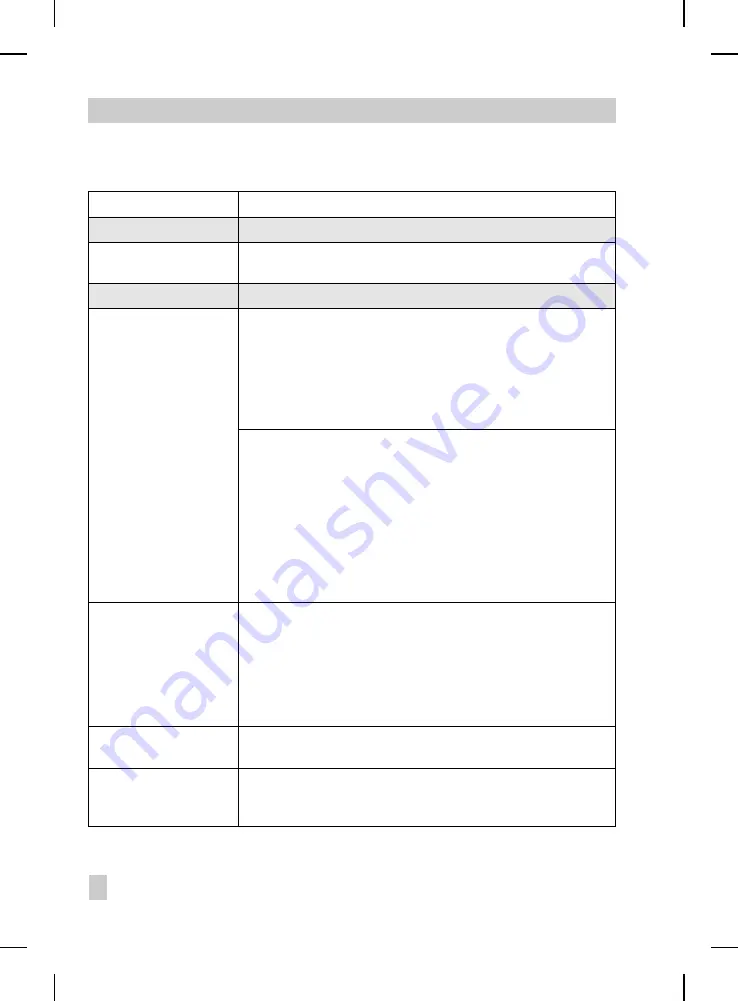
Modifications of positioner firmware in comparison to previous version
Obsolete
New
Control
R 1.23
R 1.31
Firmware adaptation for a new hardware version
Hardware version device index
.01
Control R 1.31
R 1.4
Actuator type
When the actuator type is set from "linear actuator" to
"rotary actuator", the following applies:
Initialization method ................... related to maximum range
Transmission code ...................... S90
Nominal angle........................... 90°
End position for w < ................... 1 %
End position for w > ................... 99 %
Rotational angle range begins at . 0°
Rotational angle range ends at.... 90°
When the actuator type is set from "rotary actuator" to "linear
actuator", the following applies:
Attachment................................ integrated ................... acc. to NAMUR
Initialization method ................... related to nom. range... related to nominal range
Mounting position ...................... arrow toward actuator . arrow away from actuator
Transmission code ...................... D1 .............................. -
Transmission pin position............ - ................................. A
Rated travel ............................... 15 mm ........................ 15 mm
End position for w < ................... 1 % ............................. 1 %
End position for w > ................... 125 % ......................... 125 %
Lower travel range value............. 0 mm .......................... 0 mm
Upper travel range value ........... 15 mm ........................ 15 mm
Lever length ............................... - ................................. 42 mm
Initialization method
When the initialization method is set from "maximum range" to
"nominal range", the following applies:
end position for w < 1 % end position for w > 125 %
When the initialization method is set from "nominal range" to
"maximum range", the following applies:
end position for w < 1 % end position for w > 99 %
Desired transit time
Open/closed
The adjustment range of the desired transit times was limited to
75 seconds.
Initialization
During initialization, the minimum control signals are
determined for the range 20 % to 80 % of the range of the
manipulated variable and are stored in the EEPROM.
Firmware modifications
4
EB 8382-1 EN
Summary of Contents for 3785 series
Page 69: ...EB 8382 1 EN 69...
Page 70: ...70 EB 8382 1 EN...
Page 71: ...EB 8382 1 EN 71...
Page 72: ...72 EB 8382 1 EN...
Page 73: ...EB 8382 1 EN 73...
Page 74: ...74 EB 8382 1 EN...
Page 75: ...EB 8382 1 EN 75...
Page 76: ...76 EB 8382 1 EN...
Page 77: ...EB 8382 1 EN 77...
Page 78: ...78 EB 8382 1 EN...
Page 79: ...EB 8382 1 EN 79...


























































