




























EB 8384-6S EN
93
Operation
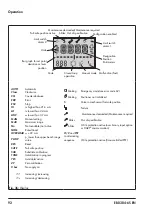
Operating modes:
−
Manual mode
(see section 7.12.1)
The positioner follows the manual set
point (Code 1) instead of the mA signal.
blinks: The positioner is not initialized.
Operation only possible over manual set
point (Code 1).
−
Automatic mode
(see section 7.12.1)
The positioner is in closed-loop operation
and follows the mA signal.
−
S
SAFE
(see section 7.12.2)
The positioner vents the output. The valve
moves to the mechanical fail-safe posi-
tion.
Bar graph:
In manual and automatic modes, the
bars indicate the set point deviation that de-
pends on the sign (+/–) and the value. One
bar element appears per 1 % set point devi
-
ation.
If the positioner has not been initialized, (
blinks on the display), the bar graph indi-
cates the lever position in degrees in relation
to the mid-axis. One bar element corre-
sponds to approximately a 5° angle of rota
-
tion. The fifth bar element blinks (reading >
30°) if the permissible angle of rotation has
been exceeded. Lever and pin position must
be checked.
Status messages
−
Failure
−
Maintenance demanded/Mainte
-
nance required
−
blinks: Out of specification
These icons indicate that an error has oc-
curred.
A classified status can be assigned to each
error. Classifications include “No message”,
“Maintenance required”, “Maintenance de
-
manded” and “Failure” (see section 9).
Enable configuration
This indicates that the codes marked with an
asterisk (*) in the code list are enabled for
configuration (see section 11.3).
6.1 Serial interface
The positioner must be supplied with at least
3.8 mA.
The positioner can be connected directly to
the computer over the local serial interface
and the serial interface adapter. The opera-
tor software is TROVIS-VIEW (version 4) with
installed device module 3730-6.
6.2 HART
®
communication
The positioner must be supplied with at least
3.6 mA. The FSK modem must be connected
in parallel to the current loop.
A DTM file (Device Type Manager) conform
-
ing to the Specification 1.2 is available for
communication. This allows the device, for
example to be run with the PACTware user
interface. All the positioner's parameters are
accessible over the DTM and the user inter-
face.
For start-up and settings, proceed as
described in section 7.1 to section 7.4. Refer
to the code list in section 11.3 for the
parameters necessary for the user interface.
Summary of Contents for TROVIS SAFE 3730-6
Page 12: ...12 EB 8384 6S EN...
Page 16: ...16 EB 8384 6S EN...
Page 22: ...22 EB 8384 6S EN...
Page 40: ...40 EB 8384 6S EN...
Page 42: ...42 EB 8384 6S EN...
Page 82: ...82 EB 8384 6S EN...
Page 90: ...90 EB 8384 6S EN...
Page 96: ...96 EB 8384 6S EN...
Page 132: ...132 EB 8384 6S EN...
Page 152: ...152 EB 8384 6S EN...
Page 155: ...EB 8384 6S EN 155...
Page 156: ...156 EB 8384 6S EN...
Page 157: ...EB 8384 6S EN 157...
Page 158: ...158 EB 8384 6S EN...
Page 159: ...EB 8384 6S EN 159...
Page 160: ...160 EB 8384 6S EN...
Page 161: ...EB 8384 6S EN 161...
Page 162: ...162 EB 8384 6S EN...
Page 163: ...EB 8384 6S EN 163...
Page 164: ...164 EB 8384 6S EN...
Page 165: ...EB 8384 6S EN 165...
Page 166: ...166 EB 8384 6S EN...
Page 167: ...EB 8384 6S EN 167...
Page 182: ...182 EB 8384 6S EN...
Page 183: ...EB 8384 6S EN 183...






















































