





























151
②
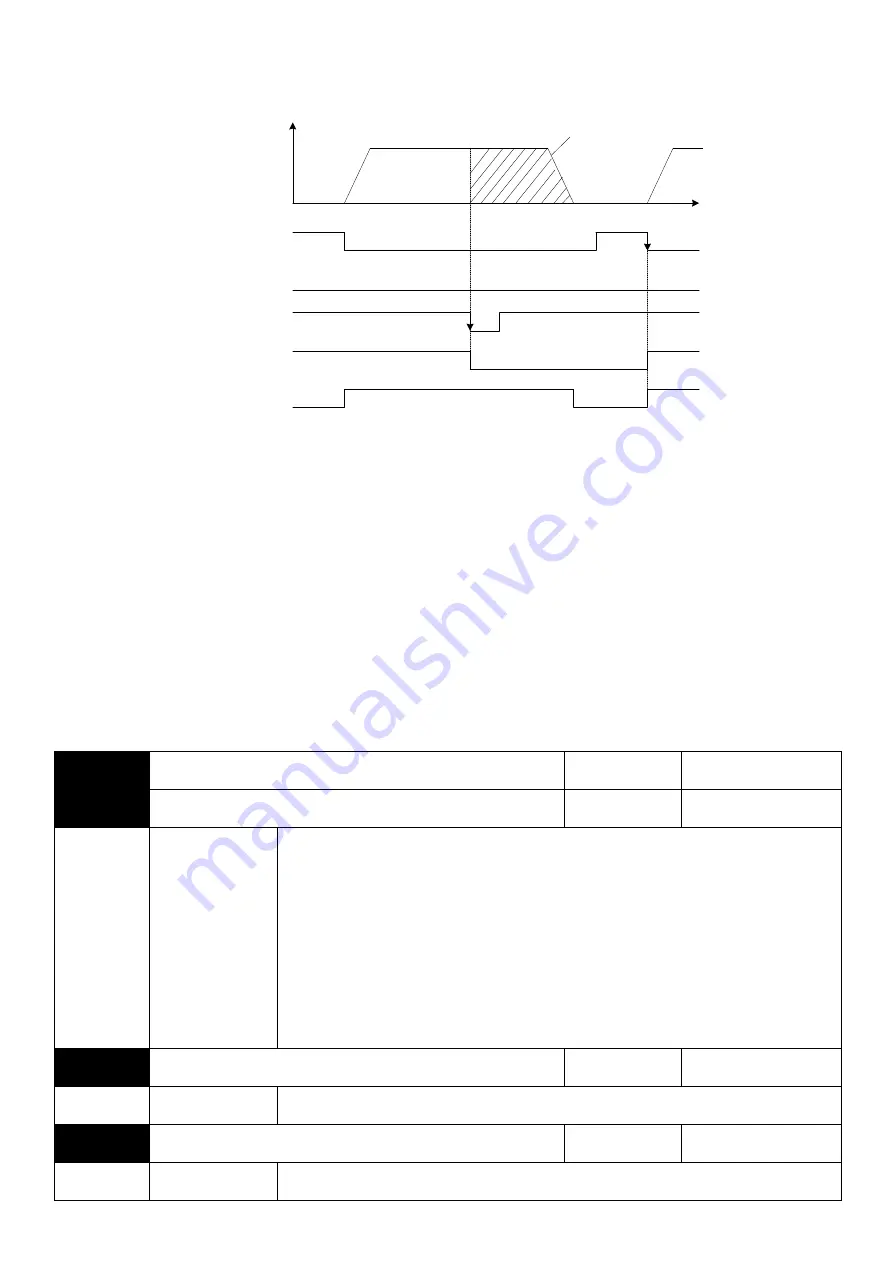
When the next start signal (FWD, REV, START, or ORG) is turned on.
ON
OFF
Speed
FWD(REV)
Interrupt input
Interrupt positioning
detection
Interrupt input enable
P2.20
:
Interrupt traveling
unit amount
Time
ON
OFF
ON
In-position
Always
ON
OFF
OFF
ON
ON
OFF
ON
③
When the positioning cancel signal is turned on during interrupt positioning motion.
④
When changed to other than the position control servo-on mode from the interrupt positioning mode.
Example) EMG: emergency stop by turning to OFF, alarm occurrence, changed to speed control, etc.
·EI20~24 signal status : (Setting value 91 to 95)
The signals set to EI 20 to 24 can be output through EOUT signals 1 to 5 of the hardware.
The ON/OFF status of the EI signal is output as a through signal to the EOUT signal regardless of the function
allocation of the corresponding EI signal.
P3.81
Analog output 1 signal assignment
Default value
0
P3.82
Analog output 2 signal assignment
Default value
0
Setting range
0:
No output
1: Command speed
2: Feedback speed
3: Torque command
4: Position deviation [unit
/
pulse]
5: Position deviation1/10 [unit
/
pulse]
6: Position deviation1/100 [unit
/
pulse]
7: Command pulse frequency
8: Speed deviation
9: Motor current
10: Effective torque
11: DC link voltage
12: OL thermal value
P3.83
Analog output 1 scale
Default value
10.0
Setting range
±2.0~±100.0 [V]
P3.84
Analog output 1 offset
Default value
0
Setting range
−50~50







































































