





























Navsight Solution
– Hardware Manual
NAVSIGHTHM.1.5
4. IMU interface specification
The link between IMU and processing unit uses a set of RS-485 half duplex communication and RS-422
synchronization interfaces that is suitable for secured, long distance communication.
4.1. Surface IMU interfaces
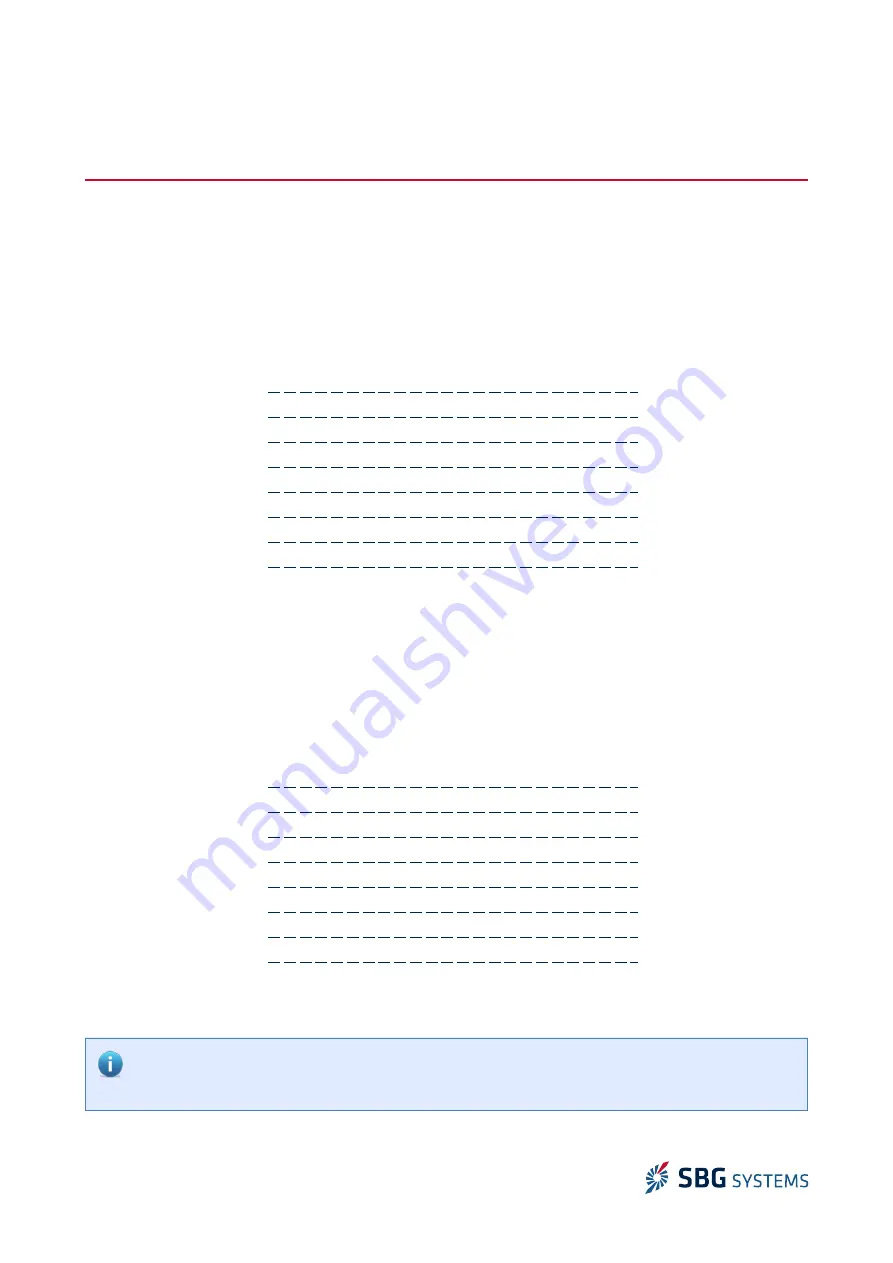
All surface IMU models use the same circular, push-pull connector (ODU G83F1C-P08RP09-0000).
The connector pin-out is the following
Pin #
Name
Description
1
SYNC+
RS-422 Sync
2
SYNC-
RS-422 Sync output -
3
VCC
Input power supply voltage
4
PGND
Power Supply Return
5
SHIELD
Cable SHIELD / Chassis Ground
6
SGND
Signal ground (Sync and Data)
7
IMU Data A
Positive RS-485 data input/output
8
IMU Data B
Negative RS-485 data input/output
The surface IMU connectors mate with the ODU connector ref: S33F1C-P08LPH90200.
4.2. Subsea IMU interfaces
All Subsea IMU models use the same sea water proof connector (McArtney Subconn FCR1508MTI).
The connector pin-out is the following:
Pin #
Name
Description
1
VCC
Input power supply voltage
2
PGND
Power Supply Return
3
SHIELD
Cable SHIELD
4
SGND
Signal ground (Sync and Data)
5
IMU Data A
Positive RS-485 data input/output
6
IMU Data B
Negative RS-485 data input/output
7
SYNC+
RS-422 Sync
8
SYNC-
RS-422 Sync output -
The subsea connector mates with Subconn Micro Circular MCIL8FNM plug.
Note: the subsea connector is made in Chloroprene rubber. The cable plug needs to be regularly
greased with a silicon compound such as Molykote 44 medium. Failing to do so can lead to the
fusion of connector plug and receptacle.
30/73







































































