




















Operating Manual 90° ACTUSAFE CMF(S)QT
OM-ENGLISH-Failsafe-QT-16xx-V2.00-2022.03.01
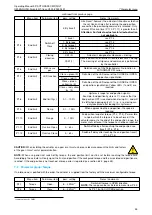
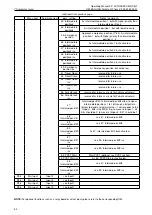
7 Parameter menu
continued from previous page
Menu item
Sub-menu item
poss. setting
Notes / comments
6: Emergency
Open
Superimposed run command; run the actuator in
direction OPEN regardless of whether the selection
switch is set to REMOTE or LOCAL operation
7: Emergency
Close
Superimposed run command; run the actuator in
direction CLOSE regardless of whether the selection
switch is set to REMOTE or LOCAL
8: Deblock
The actuator may be operated only with a switched
signal. Both in local and remote operation
9: Open/Close
The actuator moves towards OPEN if input is active and
towards CLOSED otherwise
10: Close/Open
The actuator moves towards CLOSED if input is active
and towards OPEN otherwise
11: Positioner On
Release of the postioner
12: Open inv.
As OPEN but active low
13: Close inv.
As CLOSE but active low
14: Stop inv.
As STOP but active low
15: Open Lock inv.
As Open Self-Hold but active low
16: Close Lock inv.
As Closed Self-Hold. but active low
17:
Emergency-Open
inv.
As Emergency-Open but active low
18:
Emergency-Close
inv.
As Emergency-Close but active low
19: Block
with activated (switched) signal, the actuator is locked for
operation also in local mode
20: Positioner off
Positioner lock
21: Deblock Local
The actuator may be operated only with a switched
signal.
22: Block Local
as Release Local but active low
23: Emerg. Open
Lock
Trigger lock OPEN (in LOCAL and REMOTE mode).
Actuator moves with the highest priority to OPEN;
command continues internally active after reaching the
end position OPEN. Dropping only with LOCK OFF,
Supply OFF or operating mode OFF.
24: Emerg. Close
Lock
Trigger lock CLOSE (in LOCAL and REMOTE mode).
Actuator moves with the highest priority to CLOSED;
command continues internally active after reaching the
end position CLOSED. Dropping only with LOCK OFF,
Supply OFF or operating mode OFF.
25: Emerg. Unlock
Drop the lock
26: Failsafe
Trigger the failsafe function in all operating modes (only
functional in Failsafe actuators).
27: Failsafe inv.
As Failsafe, but active low
28: Emerg. Open
Lock inv.
As Emerg. Open Lock, but active low
29: Emerg. Close
Lock inv.
As Emerg. Close Lock, but active low
30: Emerg. Unlock
inv.
As Emerg. Unlock, but active low
31: Intermediate
position1
Approach intermediate position 1 (P8.1) in REMOTE
mode (fix position approach). There is no repositioning
upon reaching the intermediate position within the
hysteresis (see P8.6). Higher priority than intermediate
position 2, 3 and 4
32: Intermediate
position2
As intermediate position 1, but with higher priority than
intermediate positions 3 and 4
continued on next page
51