





























EFAS CAM-Creator
DOC_MAN_MEC_EFAS-CAM_#SEN_#AIN_#V1
Seite 40 von 56
Version: 2018 / 02
Zero-Point-Offset
Zero point offset
This is the counter reading after referencing.
Anti-Jitter-Value
You may enter an offset to suppress any output jitter at the cam edges.
It allows you to stabilise the cam output. When the EFAS CAM Module detects a change of rotation, it will
suppress the output of the cams for the set number of ticks.
NOTE
Try to keep the number of ticks as small as possible with reference to the mechanical
conditions, resolution and rotational speed of your application.
Cycle-Time
Time the controller needs to detect the speed. You can set the time to anything between 10 ms and 1000
ms.
The module counts the ticks per cycle time you set and uses them to calculate the speed.
This time is also used to calculate the set dead times.
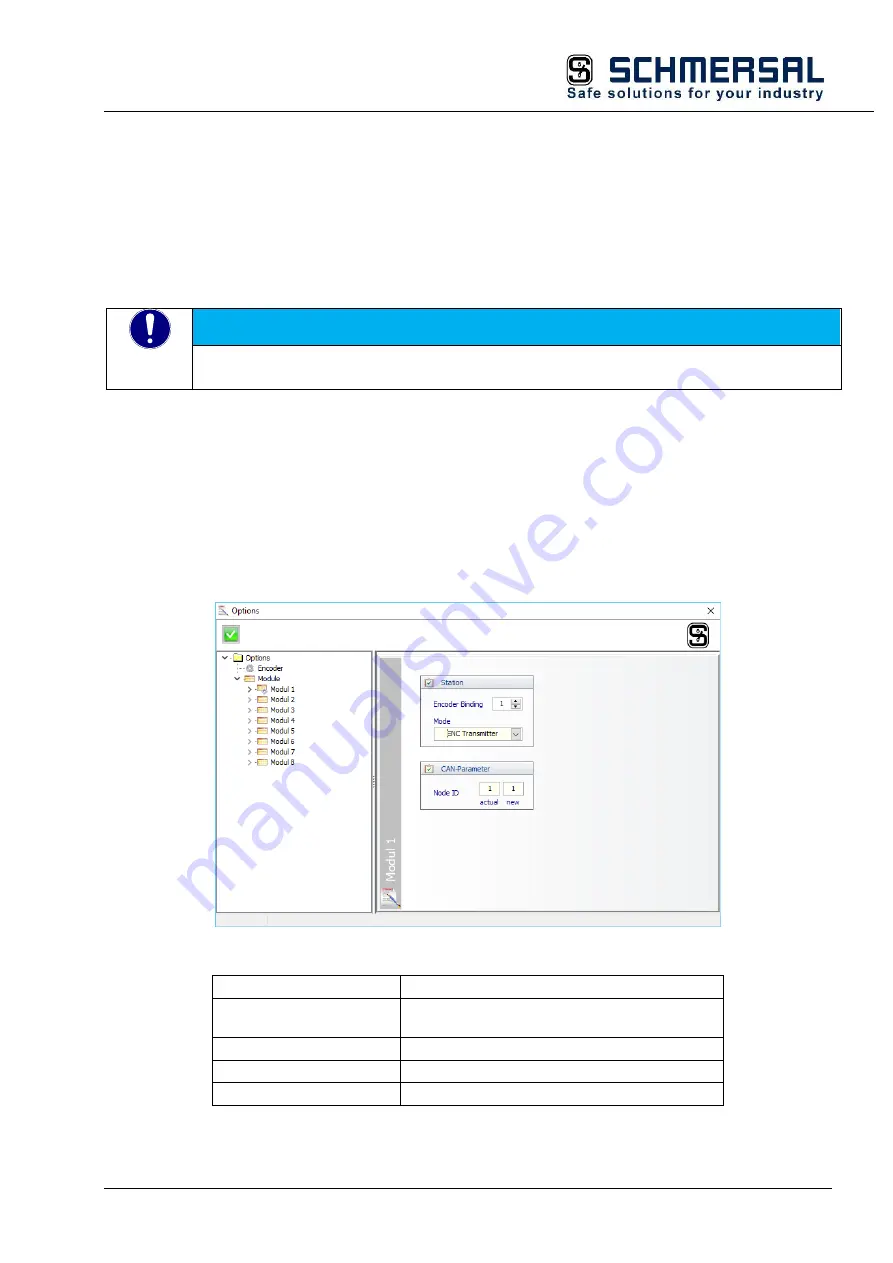
6.4.4.2 Module (Control/Options/Module)
Station
Encoder Binding allocates one of the 8 possible encoders to this module.
Pick one of the five Mode options:
none
No mode selected
ENC Transmitter
Incremental encoder (AB-Ref) - EtherCAT
transmitter
CAN Transmitter
CAN transmitter (currently not implemented)
CAN Receiver
CAN receiver (currently not implemented)
CAT Receiver
EtherCAT receiver







































































