





























EFAS CAM-Creator
DOC_MAN_MEC_EFAS-CAM_#SEN_#AIN_#V1
Seite 39 von 56
Version: 2018 / 02
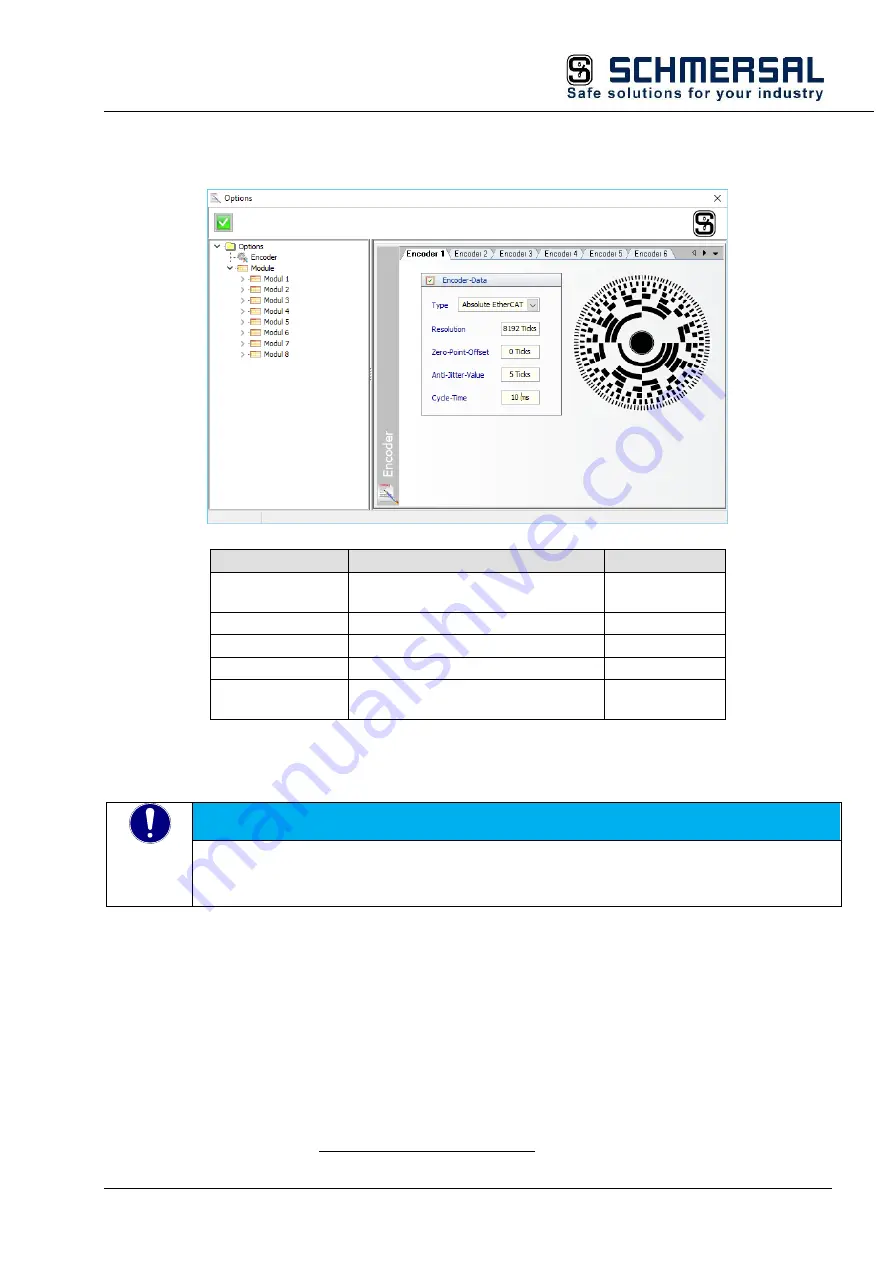
6.4.4.1 Encoder (Control/Options/Encoder)
Used to set up the incremental encoder.
Term
Explanation
Values
Type
2
Incremental 24 V, Absolute CAN,
Absolute EtherCAT
Resolution
Resolution
1...8192 ticks
Zero-Point Offset
Zero point offset
0 .. 4096 ticks
Anti-Jitter-Value
Stabilisation of output
0.. 50 ticks
Cycle-Time
Time the controller needs to detect
the speed.
10...1000 ms
You may set up up to eight different encoders. Encoder examples include "Absolute EtherCAT" or
"Absolute CAN" (currently not implemented). See section 1 for an example.
NOTE
Absolute CAN
Remember that an Absolute CAN Encoder always connects to the CAN master and that the
EFAS CAM Modules then need to link in via EtherCAT.
Resolution
Sets the encoder resolution, in increments (ticks).
Assuming your incremental encoder's resolution is 1000 (see name plate) and you are running a 4-fold
interpretation, you will be able to interpret 4000 ticks.
That is to say: When it receives the first pulse, the EFAS CAM Module will reset the reading at its Ref input
to 0. Then it will keep counting up from 0 to 3999 and reset to 0 again at 4000.
Enter the encoder's resolution (name plate).
(See Project/Options/CAM for the usable resolution)
2
The module currently supports 24V incremental encoders only







































































