





























Design and description
03.00 | EGI | Assembly and Operating Manual | en | 1396645
23
4 Design and description
4.1 Design
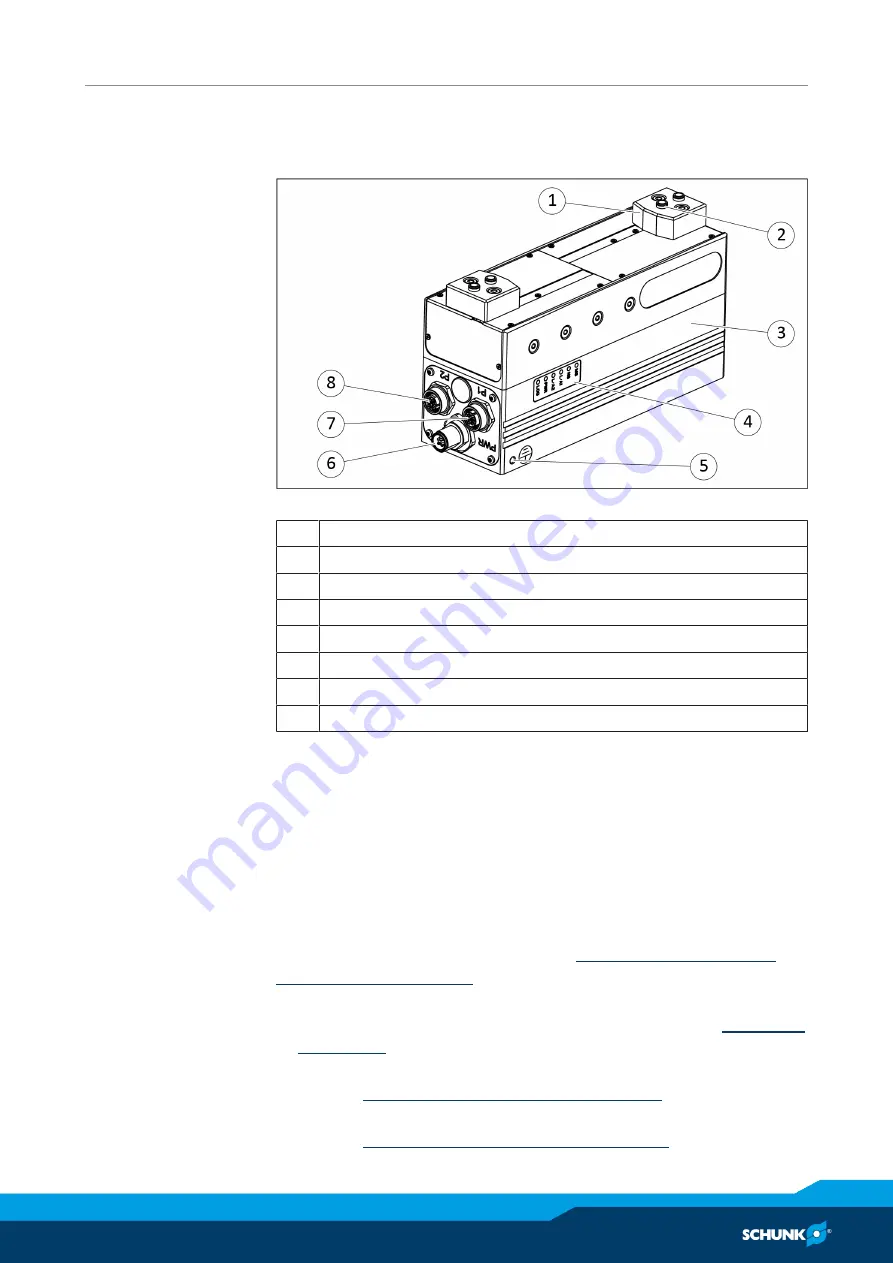
Gripper for small components EGI, example PROFINET variant
1
Base jaw
2
Centering sleeves for connecting the gripper fingers
3
Housing
4
LED status display
5
Connection for functional ground
6
Power connection PWR
7
Bus connection P1
8
Bus connection P2
4.2 Description
The product is a servo-electric 2-finger parallel gripper featuring
integrated electronics and communication interface.
EGI 80 has a system for gripping force maintenance, EGI 40 has no
gripping force maintenance.
The product is controlled via one of the following interfaces:
PROFINET, EtherCAT or EtherNet/IP™. In preparation for
commissioning, the product has an integrated web application
that can be accessed with a browser"
41].
• Details on the communication log for activation and exchange
of information are described in the software manual,
• For further information on the bus system PROFINET, see
Types of communication of PROFINET
30].
• For further information on the bus system EtherNet/IP™, see
Communication types of EtherNet/IP™
31].







































































