


















Assembly
03.00 | MEG 50 EC | Assembly and Operating Manual | en | 389201
21
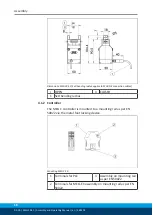
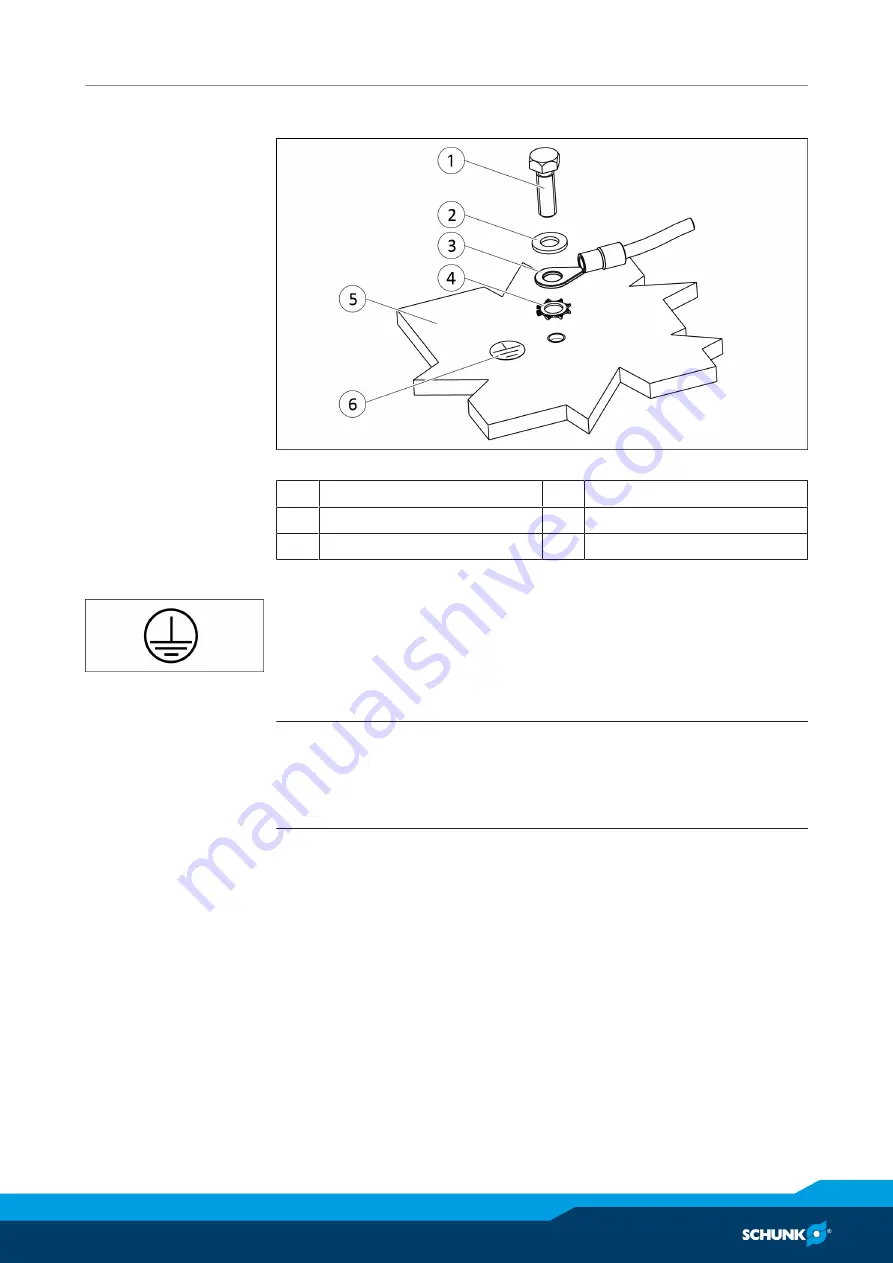
4.2.3 Connecting ground cable
Ground connection
1
Screw *
4
Toothed lock washer
2
Washer
5
Product
3
Cable lug
6
Ground marking
*) Tightening torque: 5 Nm
A ground connection with a sufficient cross-section must be
established between the product and the machine on the
customer's premises.
The ground cable must be mounted on the threaded hole
identified by the ground marking.
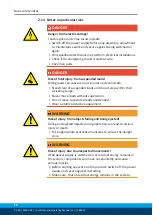
NOTE
Only connect the ground cable at the location intended for this
purpose.
Always mount the ground cable singly.
Always use all components to screw in the ground cable and install
them in this order: toothed lock washer, cable lug, washer and
bolt. See "Ground connection" diagram. Observe the tightening
torque.