


























Start-up
28
03.00 | MEG 50 EC | Assembly and Operating Manual | en | 389201
5.6 External reset
When applying a rising and then a falling edge at the input "Reset",
a reset is performed in the internal micro-processor. This means
the gripper immediately stops and all outputs are reset. The next
command that arrives is then performed entirely normally.
The controller takes about 5 seconds to perform a reset.
5.7 Analog set values
The analog values can either be specified by the PLC or entered
directly on the gripper control. Setting these values in the gripper
control is done via the potentiometers that are accessible via the
housing top of the MEG C 40 controller. The analog voltages that
are set via the potentiometers can be measured via the
corresponding measuring jacks.
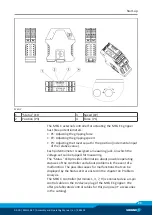
When applying analog voltages (level > 0.2 V) to the corresponding
inputs (terminals 22, 23, 24) of the gripper control, the preset
potentiometer values are ignored.
If the analog values are to be set via the gripper control
(potentiometer), there must not be any voltage on the external
analog inputs (put inputs onto GND, if possible).
If the analog voltages are specified by the PLC, it is
recommendable that the internal analog voltages are set to 0 V on
the potentiometers.
You can also combine external (via PLC) and internal (via the
potentiometers) specifications. If, for instance, the position
movement is to be automated in a process and the force and
gripper speed are to remain unchanged, then these two values can
be set at the Electronics using the potentiometers and the value
for the position is specified separately (PLC).
In the event of external voltage specification and due to slight
changes in the voltage values, the set values, steps, force and
speed may change as well. Ensure that the voltage values do not
change to an extent (unintended) that would make damage to the
workpiece possible as a result of the gripping process.
5.7.1 Gripping speed - specification
The speeds in the two modes can differ despite identical analog
"Speed" set value. This is due to the fact that the maximum speed
in live mode is significantly smaller than the maximum speed in
position mode.







































































