

























Start-up
03.00 | MEG 50 EC | Assembly and Operating Manual | en | 389201
27
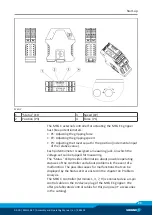
Procedure
Ø
Reference gripper "internally" or "externally".
Ø
Insert gauge blocks with regard to the gripping positions
approached later.
Ø
Open or close gripper.
Ø
Measure the output voltage for each gauge block and use it as
the reference voltage for the respective position.
During operation of the gripper in the automated system, these
reference voltages can then be compared with the analog output
signal "Position output" (terminal 15) (e.g. in order to start further
actions). Depending on the required precision and due to the
position output drift, all x-cycles must be re-referenced (High
signal on "Reference run [terminal 19] + High edge on "Gripper
open" (terminal 21) or "Gripper closed" (terminal 20). In the case
of high demands on the precision of the output "Analog position
output", we recommend performing a reference run before each
gripping cycle.
(x must be determined experimentally in the application)
5.5 Live mode
In order to safely grip a workpiece, it is recommendable to
perform the gripping procedure in "live movement" mode.
Procedure
Ø
The voltage at the input "Analog steps" (terminal 23) and at the
"Pos." potentiometer (potentiometer P3) must be set to 0V.
Ø
The analog values for speed ("Analog input: Speed" (terminal 22)
or potentiometer "Speed" (potentiometer P2) and force ("Analog
input: Force) (terminal 24) or potentiometer
"Force" (potentiometer P1) must be set to the application-
specific value (the desired values can be found under "Analog
inputs").
Ø
Due to a rising edge at the digital inputs "Gripper
open" (terminal 21) or "Gripper closed" (terminal 20), the
gripper opens or closes based on the preset force. During the
gripper finger movement, the digital output "Gripper
stopped" (terminal 13) issues a Low signal.
Ø
If the gripper moves to the workpiece stop, the output "Gripper
stopped" (terminal 13) issues a High signal; the gripper is,
however, further supplied with electrical current.
Ø
The workpiece is safely gripped until the signal on the input
"Gripper open" (terminal 21) or "Gripper closed" (terminal 20) is
reset by a falling edge.