





















Sensors
12 Sensors
The quick-change pallet system NSR maxi 220 is prepared for using
the inductive stroke measuring system and the inductive proximity
switch NI 32 (see chapter "Coupling Interface"
• Information on handling sensors is available at schunk.com or
from SCHUNK contact persons.
• Technical data for the sensors can be found in the data sheets
(included in the scope of delivery or at schunk.com).
The proximity switch used has reverse polarity protection and is
short-circuit-proof.
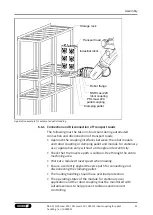
For the proper use of the proximity switches, observe the
following:
• Do not pull on the cable of the sensor.
• Do not dangle the sensor from the cable.
• Do not excessively tighten the mounting screw or clips.
• Do not exceed the permissible bending radius of the cable (
☞
catalog specifications).
• Prevent proximity switch from coming into contact with hard
objects or with chemicals; in particular, nitric, chromic or
sulfuric acid.
Proximity switches are electronic components which can react
sensitively to high-frequency interference or electromagnetic
fields.
• Check that the cable is correctly connected and installed. There
must be sufficient distance between the switches and sources
of interference and their supply cables.
• Parallel switching of multiple sensor outputs of the same design
(npn, pnp) is permissible, though this does not increase the
permissible load current.
• Please note that the leakage current of the individual sensors is
accumulative (by about 2 mA).
43
09.00 | NSR maxi 220 / PKL maxi 220 | VERO-S robot coupling for pallet
handling | en | 0489051