

























Assembly
6.1 Screw tightening torques
Screw tightening torques for mounting the pallet coupling on the
clamping pallet
(except the fitting for the clamping pin).
(Screw quality 10.9)
Screw size
M20
Screw tightening torques (Nm)
438
Screw tightening torques for mounting the robot coupling on the
robot flange. Screw tightening torques for mounting the quick-
change clamping pin on the pallet coupling.
(Screw quality 12.9)
Screw size
M12
M24
Screw tightening torques M
A
(Nm)
88
880
6.2 General Installation Notes
Request our installation drawings if doing the installation
yourself.
The NSR maxi 220 robot coupling is designed for heavy-load
industrial robots.
The robot coupling is used together with the pallet coupling for
work involving the transportation of heavy loading weights. A
robot coupling is mainly used as a single change interface.
If several linked clamping units are mounted, make sure that the
flatness and height deviation of the locating surfaces from module
to module (based on a 200 mm gage for bore holes) lies within
0.02 mm.
NOTE
When connecting the quick-change pallet systems, ensure that it is
only possible to completely ventilate the piston chamber via the
air connections during the locking process. The relevant valves or
shut-off valves should therefore be equipped with load relief. This
also applies to the turbo connection. It is vital that the turbo
connection be controlled in the NSR maxi 220 robot coupling in
order to ensure the required pull-in force at the coupling interface.
When disconnecting hose lines, the relevant openings must be
secured with locking plugs to prevent dirt or cooling lubricant from
entering.
If several units are activated via shared hose lines, feed lines with
the following minimum cross-sections must be used.
Number of modules
At least nominal hose width
1
4 mm
2, 3, 4
6 mm
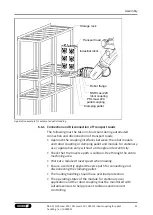
19
09.00 | NSR maxi 220 / PKL maxi 220 | VERO-S robot coupling for pallet
handling | en | 0489051







































































