


























User Manual
Chapter 5
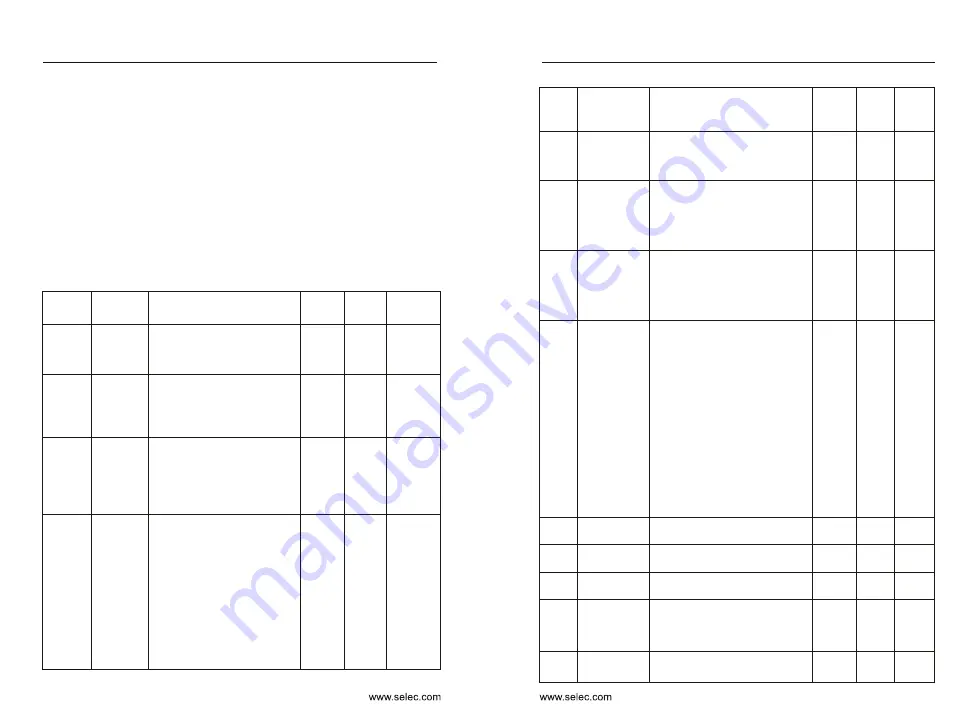
5-1 Function parameters table
P0: Basic function parameters
Function
Code
Parameter
Name
Setting Range
Default
Proper-
ty
Modbus
Address
P0-00
GP type
1 : G (Constant torque
load model)
2 : P (Fan, pump type
load model)
1
P0-01
0 : Speed sensorless vector
control (SVC)
1 : Speed sensor vector
control (FVC)
2 : V/F control
0
●
P0-02
0
P0-03
0 : Digital setting (non-retentive
at power failure)
1 : Digital setting (retentive at
power failure)
2 : AI1
3 : AI2
4 : panel potentiometer
5: Pulse setting (X6)
6 : Multi-segment instruction
7 : Simple PLC
8: PID
9 : Communication given
0
0 : Operation panel command
channel(LED close)
1 : Terminal command channel
(LED open)
2 : Communication command
channel(LED Flashing)
Converter must be switched off immediately by pushing the button
STOP/RESET if there is anything goes wrong with converter or motor; meanwhile,
please refer to Chapter 7 Fault Correcting to find out the reason why it
malfunctions. Even it is shut off, output terminals (U, V, W) may still cause electric
shock to anyone who touches them unless power ports (R, S, T) are disconnected
from main circuit.
Additionally, it will take some times for filter capacitor to discharge because
there is still charging voltage stored in the filter capacitor even main power source
is shut off. Charging indicator will be off if main power source is shut off; voltage in
the middle DC circuit must be tested by voltmeter. Only after it's confirmed that the
voltage is lower than specified value can internal circuit be touched.
5-2 Quick debugging
Start
Select preset
frequency (P0~01)
Select running &
control mode (P0~02)
Select Starting
mode (P2-00~04)
Select Acc-Dec time
(P0-04/P0-05)
Select running
direction (P0-06)
Select half mode
(P2-05~08)
Starting & Observing
Optimization of
parameters
P0-01
0 : Preset frequency
1 : Preset panel potentiometer
2 : Preset external Ai1
3 : Preset external Ai2
0 : Keyboard control
1 : Running by terminal,
effective control by STOP key
2 : Running by terminals,
ineffective control by STOP key
3 : Controlled by communication
0 : Starting directly
1 : Starting after DC braking
P0-02
P2-00
P0-06
0 : Default direction
1 : Reverse direction
P2-05
0 : Freely stopping
1 : Stopping by decelerating
2 : Decelerating-DC braking
stopping
User Manual
Chapter 5
19
18
“●”: Indicates that this parameter cannot be changed while the inverter is running.
“○”: Indicates that this parameter can be changed while the inverter is running or
stopped.
“×”: Indicates that this parameter is only the actual detected record value and
cannot be changed.
PP-00 is set to a non-zero value, that is, the parameter protection password is set.
The parameter menu must be entered after the password is entered correctly. To
cancel the password, set PP-00 to 00000.
FUNCTION PARAMETER
×
Speed
control
mode
selection
Run
command
source
selection
Main
frequency
source
X selection
Preset
frequency
0.00Hz
~
Maximum frequency
(P0-10)
50.00Hz
Rotation
direction
0
Maximum
frequency
50.00Hz
〜
500.00Hz
50.00Hz
Source of
frequency
upper limit
Frequency
upper limit
Frequency lower limit P0-14
~
Maximum frequency P0-10
50.00Hz
●
Auxiliary
frequency
source
Y selection
Frequency
offset of
auxiliary
frequency
source for
X operation
0%
~
150%
100%
Frequency
source
overlay
selection
00
P0-04
Same as P0-03 (main frequency
source X selection)
0
Fun-
ction
Code
Parameter
Name
Setting range
Default
Prope-
rty
Modbus
Address
●
P0-05
0 : relative to the maximum
frequency
1 : relative to the frequency
source X
0
○
○
Frequency
offset of
auxiliary
frequency
source for
Y operation
P0-06
○
Ones place : frequency source
selection
0 : main frequency source X
1 : X and Y operation (operation
relationship determined by
Tens position)
2 : Switchover between X and Y
3 : Switchover between X and
"X and Y operation"
4 : Switchover between Y and
"X and Y operation"
Tens place: frequency source
primary and secondary
operation relationship
0 : main + auxiliary
1 : main - auxiliary
2 : the maximum of the two
3 : the minimum of the two
P0-07
○
P0-08
○
P0-09
0 : Same direction
1 : Reverse direction
○
P0-10
●
0 : Set by P0-12 1 : AI1
2 : AI2 3 : AI3
4 : Pulse setting
5 : Communication setting
P0-11
●
0
P0-12
○
61441
61442
61443
61444
61445
61446
61447
61448
61449
61450
61451
61452
61453







































































