





























3-wire control mode 1
3: Rising edge of pulse and terminal SIn will be enabled while three-wire
control mode 2 is enabled; run command is controlled by both REV of FWD
keys which control the running direction at the same time; stop signal is
generated by a on instant input terminal SIn. The function of corresponding
input terminal is defined by SIn terminal as No.3 function "three-wire control".
3-wire control mode 2
Tips:
As for two-wire control mode, with the premise of the following two
points, even control terminals FWD/REV remain enabled, converter will not
be running any more after stop signal disappears:
1.FWD/REV terminals are enabled;
2.Converter is shut down because of stop signal generated by the other
source; FWD/REV terminals must be enabled again if converter needs to be
started.
FWD
REV
COM
SB1
SB2
K
Sin
K
OFF
ON
Run
SB2
SB1
Stop
Forward
Reverse
FWD
REV
COM
SB1
SB2
SB3
SIn
Stop
SB3
SB2
Reverse running
Forward running
SB1
Keep the converter in current running frequency when thE
terminal is valid, and the running time is not include in
program running time It can keep converter running in
current frequency when terminals are enabled; during this
period, running time is not count into the time of program run
20
Pause of
program
Run
20 -31
Reserved
Reserved
0: Two-wire control mode 1 is the most common two-wire mode, which can
make directions conformed with each other; Forward or reverse direction will
be decided by the instructions from FWD/REV terminals.
•
This parameter defines three different control modes of external
terminals.
P5-18
Default: 0
Terminal control
mode
0 : Two-wire control mode 1
1 : Two-wire control mode 2
2 : Three-wire control mode 1
3 : Three-wire control mode 2
2-wire control mode 1
1: Two-wire control mode 2 can keep directions separated with each other;
FWD terminal will be enabled while this mode is enabled; but direction will be
decided by REV.
2-wire control mode 2
2: Rising edge of pulse and terminal SIn will be enabled while three-wire
control mode 1 is enabled; direction is controlled by REV key; stop signal is
controlled by input terminal SIn. The function of corresponding input terminal
is defined by SIn terminal as No.3 function "three-wire control".
FWD
REV
COM
K1
K2
K1
K2
OFF
OFF
OFF
OFF
ON
ON
Command
code
Stop
Forward
Reverse
FWD
REV
COM
K1
K2
K1
K2
OFF
OFF
OFF
ON
ON
Command
code
Stop
Forward
Reverse
ON
ON
OFF
Stop
49
48
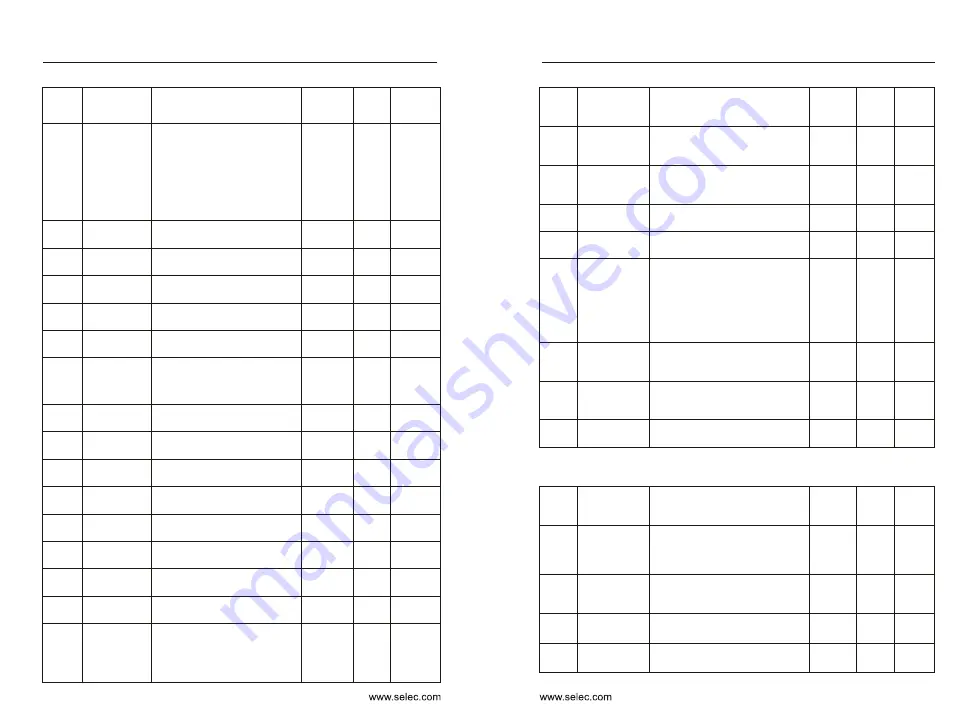
PA-02
PID feedback
source
0
PA-03
PID action
direction
0 : Forward action
1 : Reverse action
0
PA-04
PID given
feedback range
0
〜
65535
1000
PA-05
Proportional
gain Kp1
0.0
〜
100.0
20
PA-06
Integration
time Ti1
0.01s
〜
10.00s
1
PA-07
Derivative
time Td1
0.000s
〜
10.000s
0.000s
PA-08
Cut-off
frequency of
PID reverse
rotation
0.00
〜
Maximum frequency
2.00Hz
PA-09
PID deviation
limit
0.0%
〜
100.0%
0.0%
PA-10
PID differential
limiting
0.00%
〜
100.00%
0.10%
PA-11
PID given
change time
0.00
〜
650.00s
0.00s
PA-12
PID feedback
filter time
0.00
〜
60.00s
0.00s
PA-13
PID output
filtering time
0.00
〜
60.00s
0.00s
PA-15
Proportional
gain Kp2
0.0
〜
100.0
20.0
PA-16
Integration
time Ti2
0.01s
〜
10.00s
2.00s
PA-17
Derivative
time Td2
0.000s
〜
10.000s
0.000s
PA-18
PID
parameter
switchover
condition
0
PA-19
PID parameter
switchover
deviation 1
0.0%
〜
PA-20
20.0%
PA-20
PID parameter
switchover
deviation 2
PA-19
〜
100.0%
80.0%
PA-21
PID initial
value
0.0%
〜
100.0%
0.0%
PA-22
PID initial
value hold time
Ones place
: Integral separation
0 : Invalid 1 : Valid
Tens place
: Whether to stop
integral operation when the
output reaches the limit
0 : Continue to integrate
1 : Stop integral operation
0.0%
PA-25
PID integral
attribute
00
PA-26
PID feedback
loss detection
value
0.0%
PID feedback
loss detection
time
0.0s
〜
20.0s
0.0s
PA-28
PID shutdown
operation
Parameter
Name
Setting Range
Default
Prope-
rty
Modbus
Address
Fun-
ction
Code
○
0 : AI1 1 : AI2
2 : AI3/ Panel potentiometer
3 : AI1-AI2
4 : Pulse setting(X6)
5 : Communication given
6 : AI1+AI2
7 : MAX (|AI1|, |AI2|)
8 : MIN (|AI1|, |AI2|)
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
0 : No switchover
1 : Switchover via the input
terminal
2 : Automatic switchover based
on deviation
Fun-
ction
Code
Parameter
Name
Setting range
Default
Prope-
rty
Modbus
Address
○
○
0.00
〜
650.00s
0.0% : no judge feedback loss
0.1%~100.0%
PA-27
PB-00
Swing
frequency
setting mode
0
PB-01
Swing
frequency
amplitude
0.0%
~
100.0%
0.0%
PB-02
Kick frequency
amplitude
0.0%
~
50.0%
0.0%
PB-03
Wobble cycle
0.1s
~
3000.0s
10.0s
PB: Swing frequency, fixed length and counting
Fun-
ction
Code
Parameter
Name
Setting range
Default
Prope-
rty
Modbus
Address
○
○
○
○
○
○
○
0 : Relative to the center
frequency
1 : Relative to the Maximum
frequency
0 : stop does not operate
1 : stop operation
○
○
○
User Manual
Chapter 5
User Manual
Chapter 5
64003
64004
64005
64006
64007
64008
64009
64010
64011
64012
64013
64014
64016
64017
64018
64019
64020
64021
64022
64023
64026
64027
64028
64029
64257
64258
64259
64260
0







































































