





















User Manual
User Manual
Chapter 3
Chapter 3
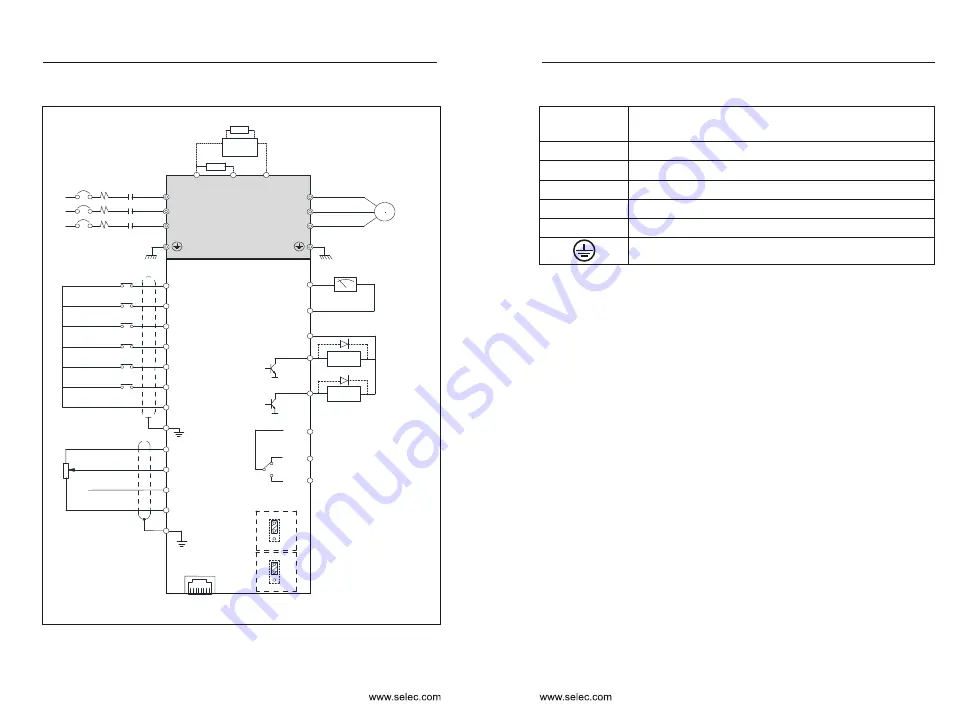
3-2-1 Standard wiring diagram for FD300
9
8
Braking resistor
QF
MC
R/L1
S/L2
T/L3
T
S
R
B1
B2
U
W
V
PE
M
FWD
External fault
REV
Multi-phase
reference velocity 1
Common terminal
X1 Input terminal 1
X2 Input terminal 2
X3 Input terminal 3
X4 Input terminal 4
COM
PE
COM
X5 Input terminal 5
CN1
0-10V Input
0-20VmA Input
Potentio-
meter
3-5K
+
10V Frequency setting
power supply
AI1 Multi-functional
Analog input
AI2 Jumper 3
GND
PE
0-20mA
AI2
0-10V
Jumper 4
0-20mA
AO
0-10V
AO
GND
Analog output
Default setting:
operating frequency
0-10V/0-20mA
1
5V
485
+
485
-
GND
485 communication
+
24V
port
Y1
8
Default setting:
Run command
ROA
ROB
ROC
Default setting:
Fault output
Output of relay
FD100
BR
RY1
3 phase power supply
Single phase 220V inverter
input connect with L N
415V±15%, 50/60Hz
Frequency given
0-10V
MC
R/L
S/N
T
R
S
T
X1
X2
X3
X4
X5
COM
PE
+10V
AI1
AI2
GND
PE
Input 0-20mA
Input 0-10V
W
V
U
PE
QF
B1
B2
AO out
RY1
ROA
ROB
ROC
M
J3
0-10V
AI2
0-20mA
+24V
Y1
J5
De
fa
ul
t se
tti
ng
Three-wire control
mode
3-
5K
AO
GND
PE
Motor
grounding
Grounding of
power measurement
J4
0-10V
AO
0-20mA
COM
Main
circuit
Control circuit
1
3
5
7
485+
485-
FWD
REV
Multi-phase
reference velocity 1
Multi-phase
reference velocity 2
Input terminal 1
Input terminal 2
Input terminal 3
Input terminal 4
Default setting:
operating frequency
0-10V / 0-20mA
Default setting:
Run indication
Output of relay
Current is less than 30mA
Output of relay
Default setting:
Fault output
Pot
ent
iom
ete
r
Preset frequency
0-10V
Power for
frequency
setting
Multi-functional AI
Three-phase source 415V ±15%
Single-phase source 220V ±15%
50/60Hz
3-3 Main circuit terminal description
Terminal
symbol (code)
Functional descriptions
Power input terminal for three-phase 380V inverter.
(Power input terminal for single-phase 220V inverter)
The inverter output terminal is connected to a 3phase AC motor.
Braking resistor connection terminal (optional)
External brake unit connection terminal (optional).
Ground terminal.
R, S, T
L,N
U, V, W
B1, B2
(+), (-)
When wiring, please follow the electrical regulations to ensure the safety.
3-3-1 Power input terminal R
,
S
,
T
Ÿ
In order to prevent the high voltage and high current input into the power
supply circuit and damage the rectifier part, it is necessary to connect the
AC reactor on the input side, and also improve the power factor of the
input side.
Ÿ
Do not use the main circuit power ON/OFF method to control the
operation and stop of the inverter. The drive's operation and stop should
be controlled using the RUN and STOP keys on the keypad panel or the
control loop terminals. If the main power ON/OFF method must be used
to control the operation of the inverter, it can only be performed once per
hour.
Ÿ
A circuit breaker is required between the three-phase AC input power
supply and the main circuit terminals (R, S and T). It is better to connect a
magnetic contactor (MC) in series to cut off the power supply when the
inverter protection function is activated (the R-C surge absorber is
required at both ends of the electromagnetic contactor).
Ÿ
To reduce the interference of the inverter to surrounding equipment, the
noise filter can be connected to the input side.
Ÿ
If the inverter is equipped with an earth leakage circuit breaker as a
leakage fault protection, in order to prevent the leakage circuit breaker
from malfunctioning, please select a sensitivity current of 200 mA or
more and an operation time of 0.1 second or longer.
Ÿ
Do not connect the three-phase power supply to the single-phase power
supply.
Braking
unit
BR
BR
Three-phase source 380V±15%
50/60Hz
Single-phase source 220V±15%
R/L
S/N
T
QF
MC
R
S
T
(+)/B1
B2
(-)
U
V
W
PE
PE
Main Circuit
M
Motor
grounding
Grounding of power
measurement
FWD
REV
Non-function
Default setting
X1
X2
X3
X4
X6
X5
COM
PE
AO
GND
+24V
Y1
COM
Y2
COM
ROA
Input terminal 1
Input terminal 2
Input terminal 3
Input terminal 4
Input terminal 6
Input terminal 5
AO out
RY1
RY2
Default setting :
Operating
frequency
0-10V / 0-20mA
Default setting :
Run indication
Default setting :
Direction
indication
Output of relay
Current is less than 30mA
Output of relay
Default setting :
Fault output
Non-function
Non-function
Non-function
ROB
ROC
Preset frequency
0-10V
Potentiometer
3-5K
Input 0-10V
Input 0-20mA
+10V
AI1
AI2
GND
PE
Control Circuit
Power for
frequency
setting
Multi-functional AI
J13
0-20mA
AO
0-10V
J1
0-20mA
AI2
J2
0-10V







































































