



















31
31
LED Status Indicators
31
Appendix A
LED Status Indicators
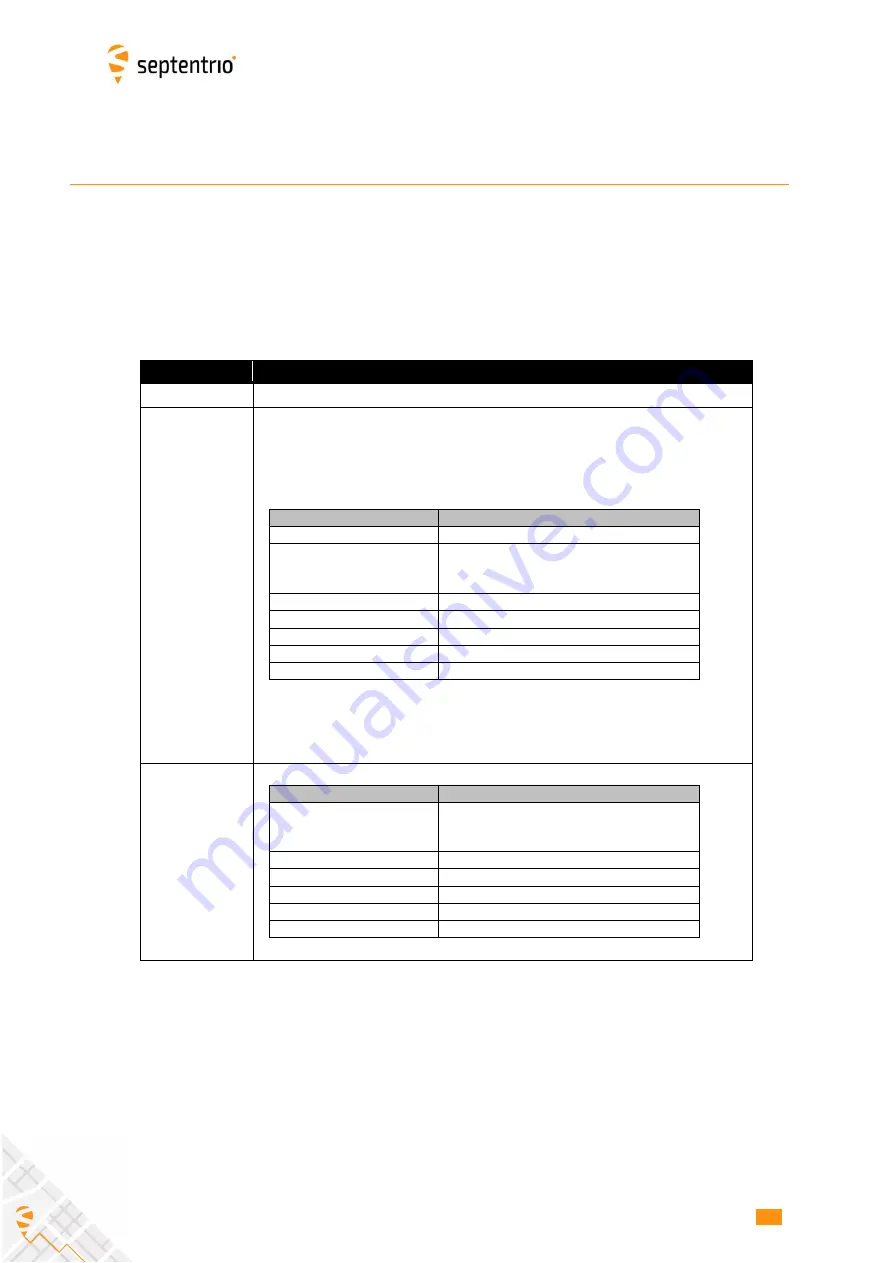
The LED pins can be used to monitor the receiver status. They can be used to drive
external LEDs (max drive current 10mA). It is assumed that the LED lights when the
electrical level of the corresponding pin is high.
The general-purpose LED (GPLED pin) is configured with the
setLEDMode
command.
The following modes are supported. The default mode is “PVTLED”.
GPLED mode LED Behaviour
PVTLED
LED lights when a PVT solution is available.
DIFFCORLED
Differential correction indicator. In rover PVT mode, this LED reports
the number of satellites for which differential corrections have been
provided in the last received differential correction message (RTCM
or CMR).
LED behaviour
Number of satellites with corrections
LED is off
No differential correction message received
blinks fast and
continuously (10 times per
second)
0
blinks once, then pauses
1, 2
blinks twice, then pauses
3, 4
blinks 3 times, then pauses 5, 6
blinks 4 times, then pauses 7, 8
blinks 5 times, then pauses 9 or more
The LED is solid ’ON’ when the receiver is outputting differential
corrections as a static base station.
TRACKLED
LED behaviour
Number of satellites in tracking
blinks fast and
continuously (10 times per
second)
0
blinks once, then pauses
1, 2
blinks twice, then pauses
3, 4
blinks 3 times, then pauses 5, 6
blinks 4 times, then pauses 7, 8
blinks 5 times, then pauses 9 or more







































































