





























114
Operating Instructions – MOVIAXIS® MX Multi-Axis Servo Inverter
5
Communication selection
Startup
5.7
Communication selection
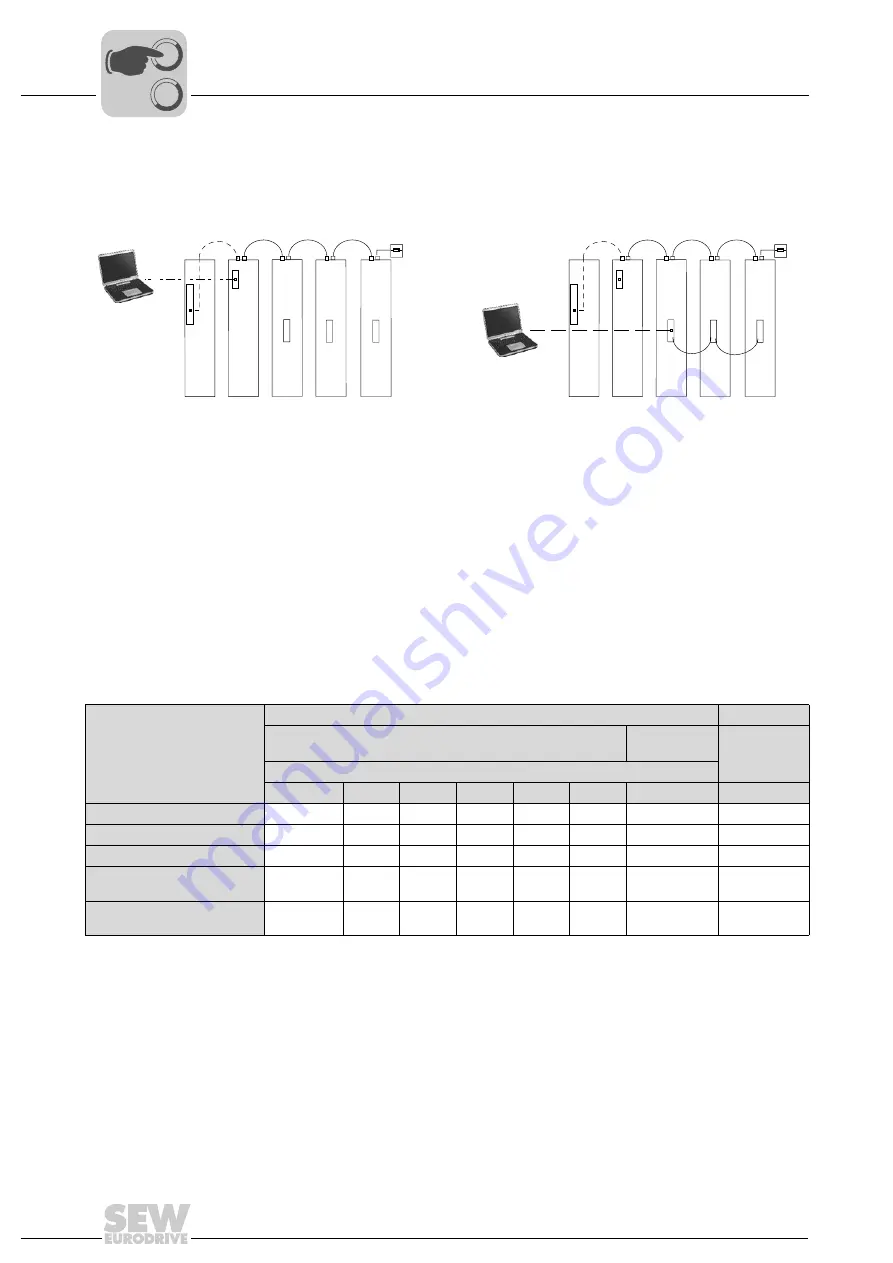
The following figures show the possible access types for the system buses of the unit
system.
SEW-EURODRIVE recommends the following communication paths:
• Unit system without master module: CAN
• Unit system with master DHP: CAN
• Unit system with master DHE/DHF/DHR/UFx: TCP/IP or USB
Use the following table to select the type of communication for startup depending on the
unit configuration.
62084axx
Figure 70: Communication access
MXP
MXA
MXA
MXA
MXM
[1]
[2]
MXP
MXA
MXA
MXA
MXM
[2]
[3]
[1]
PC-CAN to CAN
[2]
Master module with CAN- / EtherCAT-based system bus
[3]
PC-CAN to CAN2
Hardware configuration of
the unit system
Access to
Access via
Master module
Supply
module
Axis modules
Via communication interface ...
PROFIBUS
CAN
RS485
TCP/IP
USB
RT
CAN
1)
CAN2
2)
Without master module
x
x
Master DHP
x
x
x
x
Master DHE
x
(x)
x
x
x
Master
DHF/UFx41
3)
x
4)
x
(x)
x
x
x
Master
DHR/UFx41
x
(x)
x
x
x
5)
x
1) CAN-based system bus
2) Only if CAN2 is free for engineering
3) In preparation
4) Only for operation for DP
5) Realtime Ethernet parameter channel via controller
0
0
I
Summary of Contents for MOVIAXIS MX
Page 2: ...SEW EURODRIVE Driving the world...
Page 210: ......
Page 211: ...SEW EURODRIVE Driving the world...







































































