




























144
Operating Instructions – MOVIAXIS® MX Multi-Axis Servo Inverter
5
Application examples
Startup
Emulation source direct
The signals of the connected encoder are looped through to emulation directly.
With signal fan-out, increments per motor revolution
This selection uses software emulation.
The following settings are possible in "increments per motor revolution":
64 / 128 / 256 / 512 / 1024 / 2048 / 4096.
The output increments per motor revolution at the emulation terminal are independent
of the resolution of the connected encoder.
5.11 Application examples
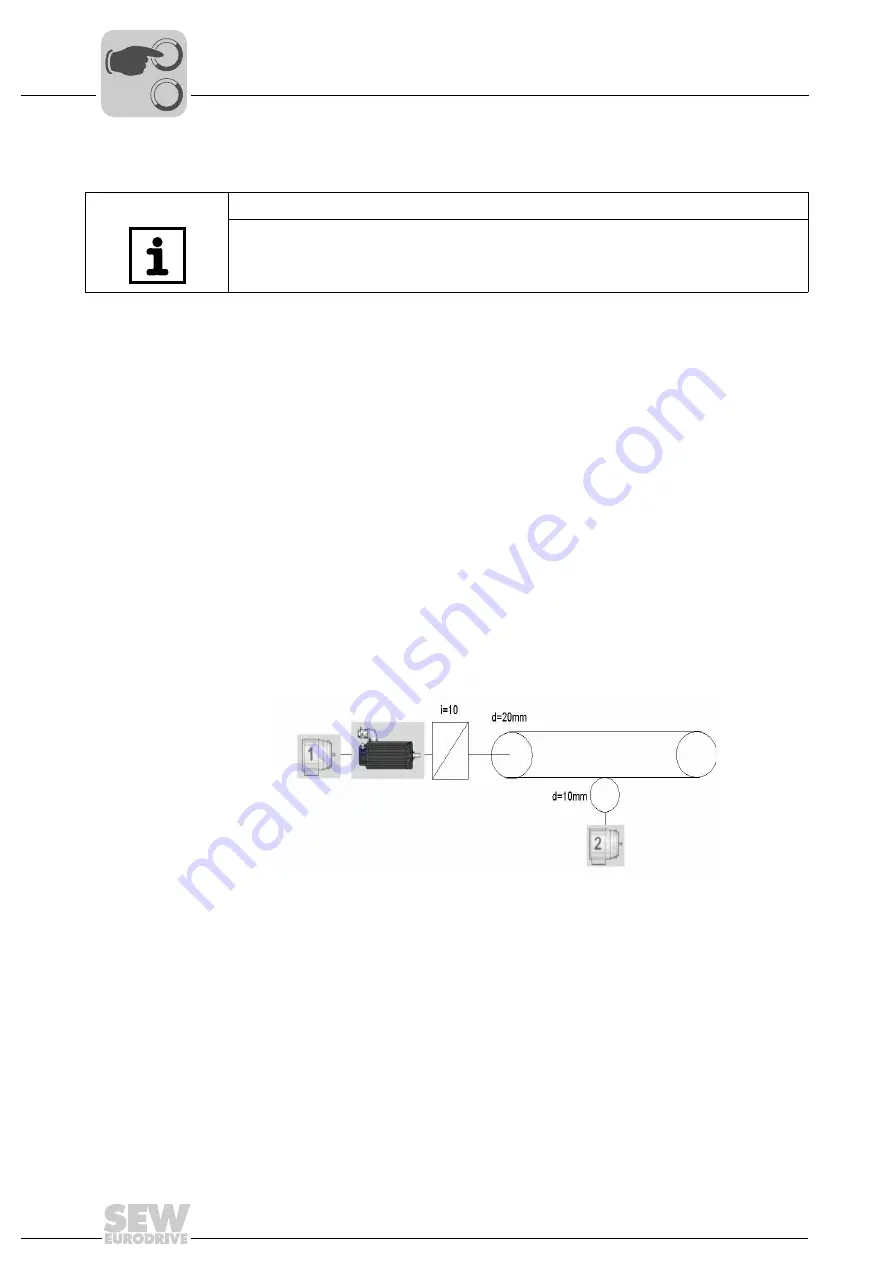
Example 1: Rotatory encoder as distance encoder
Applications: E.g. non-linear transmission elements, such as crank arms, flying saws,
master value axes, such as electronic cams.
In this example, the position actual value of the absolute encoder designated as encoder
2 is used directly for position control. The encoder ratios for motor encoder (encoder 1)
and distance encoder (encoder 2) must be set during startup. In this example, the en-
coder ratio between encoder 1 and encoder 2 is "1:5". The encoder ratio between
encoder 1 and encoder 2 is automatically determined by moving the system. It can also
be calculated and entered manually.
NOTES
If a resolver is connected to the encoder input of the basic unit, this cannot be used as
"emulation source direct". This is possible in connection with software emulation only.
0
0
I
Summary of Contents for MOVIAXIS MX
Page 2: ...SEW EURODRIVE Driving the world...
Page 210: ......
Page 211: ...SEW EURODRIVE Driving the world...







































































