




























Manual – MOVIDRIVE® MDX60B/61B Communication and Fieldbus Unit Profile
41
5
MOVILINK® profile via CAN
CAN Interfaces of MOVIDRIVE® B
Process data tele-
grams for 3 pro-
cess data words
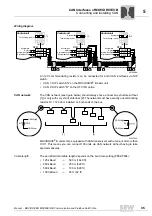
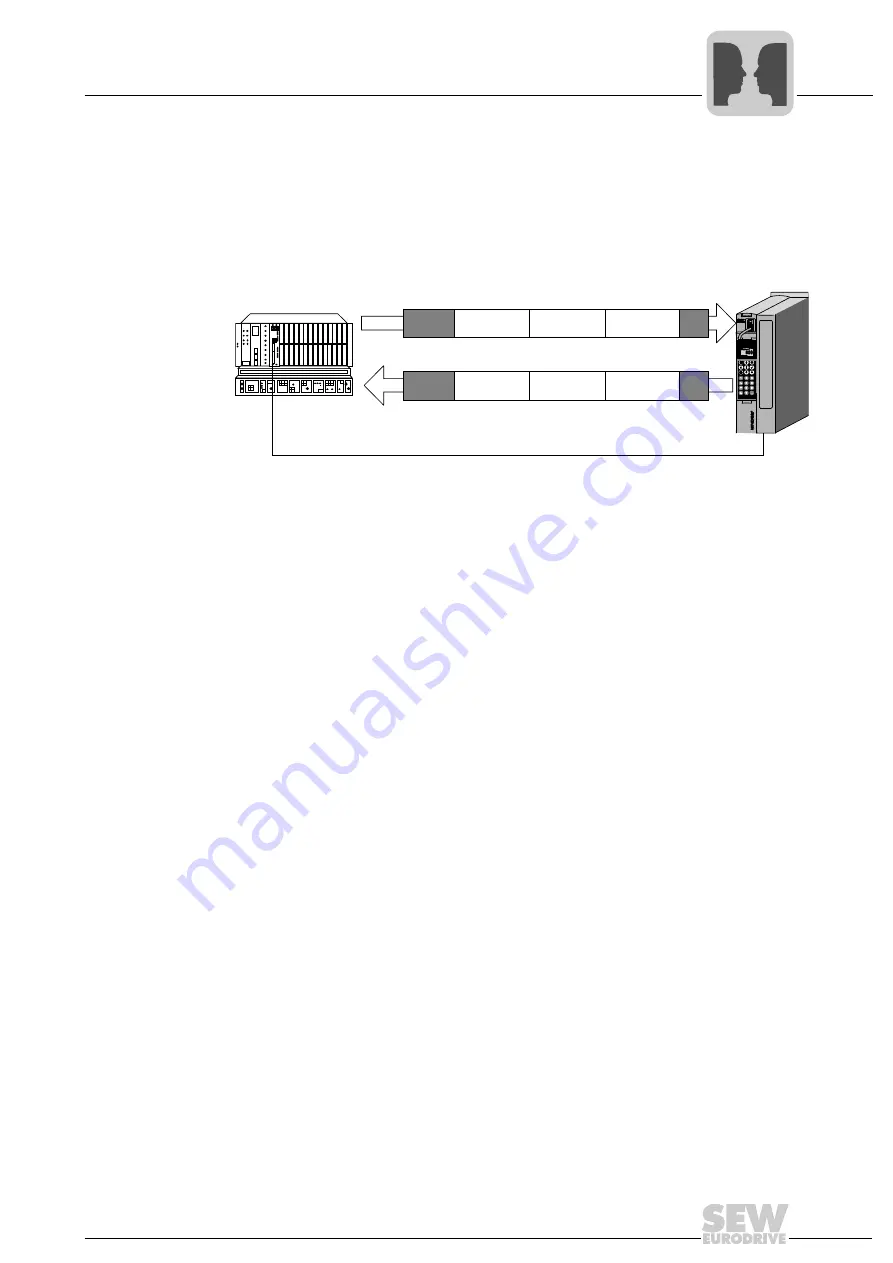
The process data telegrams comprise a process output data telegram and a process
input data telegram. The process output data telegram is sent from the master to a slave
and contains the setpoints for the slave. The process input data telegram is sent from
the slave to the master and contains actual values of the slave.
A telegram with 6 bytes of user data is required for transmitting 3 process data words.
The next page describes the transmission of up to 10 process data words.
The process data at sent at certain points of time during the fixed time base of 5 milli-
seconds. A distinction is made between synchronous and asynchronous process data.
The synchronous process data are sent within the time interval at certain points of time.
The master controller must send the process output data at the earliest 500 ms after the
second millisecond and at the latest 500 ms before the first millisecond. MOVIDRIVE
®
sends the process input data as response in the first millisecond.
Asynchronous process data are not sent during the time interval. The master controller
sends process output data at any time. MOVIDRIVE
®
responds with a process input
data telegram within a maximum of 1 millisecond.
The coding of process input and output data words is described in chapter "SEW unit
profile".
64299AXX
Byte
0
Byte
1
Byte
2
Byte
3
Byte
4
Byte
5
PO1
PO2
PO3
PI1
PI2
PI3
ID
ID
CRC
CRC
Summary of Contents for MOVIDRIVE MDX60B
Page 2: ...SEW EURODRIVE Driving the world...
Page 142: ......
Page 143: ...SEW EURODRIVE Driving the world...







































































