




























Manual – MOVIDRIVE® MDX60B/61B Communication and Fieldbus Unit Profile
43
5
MOVILINK® profile via CAN
CAN Interfaces of MOVIDRIVE® B
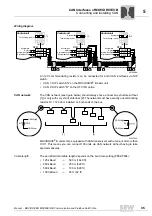
Fragmentation type:
"Fragmentation count" begins with "0" and is increased by one with each fragment.
Sequence
First, the master transmits all fragments to the slave. Once the slave has accepted trans-
mission, it returns as many fragmented process data as it has received.
The following 4 telegrams are sent when transmitting 10 process data words:
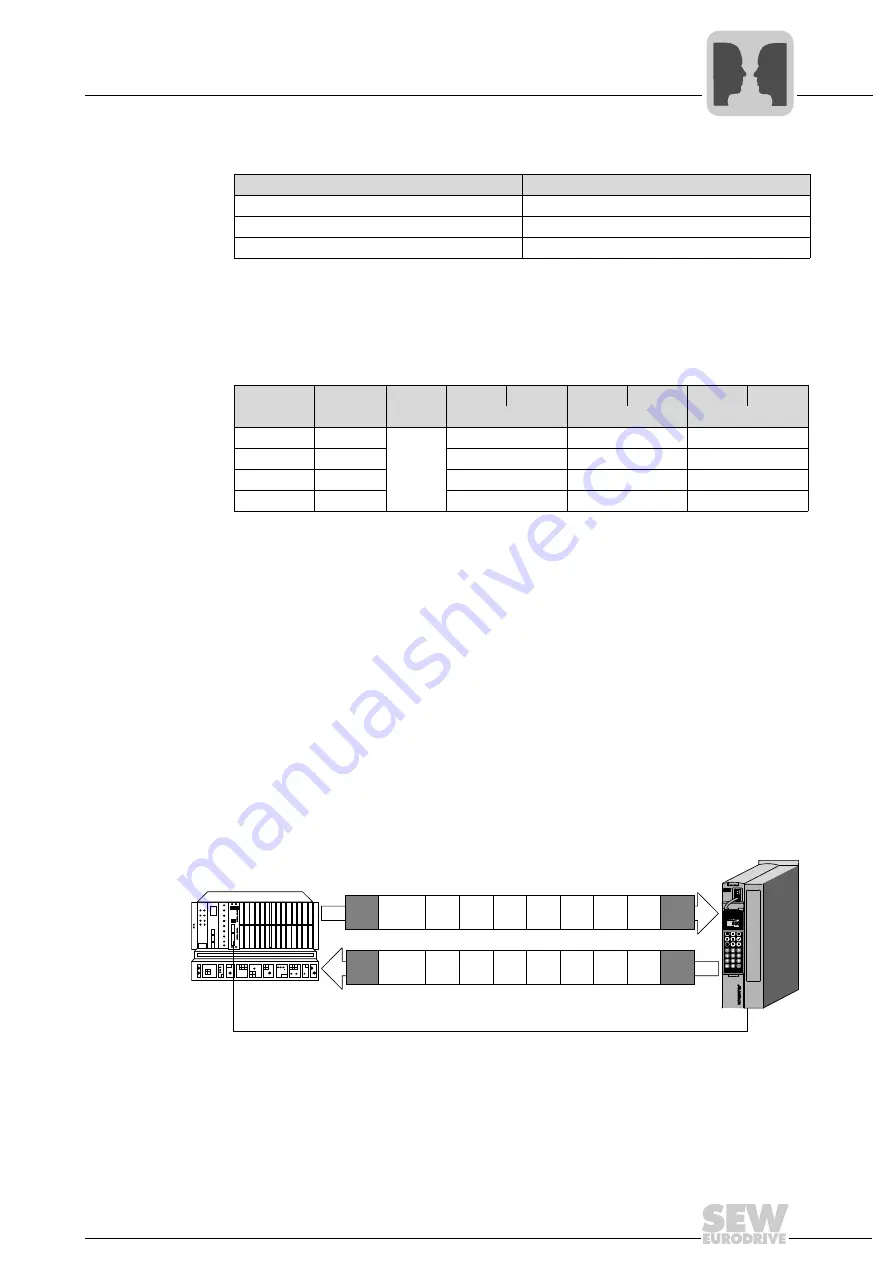
Parameter
telegrams
Parameter telegrams (see figure below) consist of a parameter request telegram and a
parameter response telegram.
The master sends the parameter request telegram to read or write a parameter value.
Its structure is as follows:
• Management byte
• Subindex
• Index high byte
• Index low byte
• 4 data bytes
The management byte specifies the service to be performed. The index specifies the
parameter for which the service is to be performed. The 4 data bytes contain the number
value to be read or written (see "Fieldbus Unit Profile" manual).
The slave sends the parameter response telegram in response to the parameter request
telegram from the master. Request and response telegrams have the same structure.
Fragmentation type
Meaning
0
First fragment
1
Middle fragment
2
Last fragment
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
Fragment
Length
IO data
IO data
IO data
Message 1
0x00
20dec
PD word 1
PD word 2
PD word 3
Message 2
0x41
PD word 4
PD word 5
PD word 6
Message 3
0x42
PD word 7
PD word 8
PD word 10
Message 4
0x83
PD word 10
Reserved
Reserved
64303AEN
Byte
0
Byte
1
Byte
2
Byte
3
Byte
4
Byte
5
Byte
6
Byte
7
ID
ID
CRC
CRC
Sub
index
Index
High
Index
High
Index
Low
Index
Low
Data
MSB
Data
MSB
Data
Data
Data
Data
Data
LSB
Data
LSB
Manage-
ment
Manage-
ment
Sub
index
Summary of Contents for MOVIDRIVE MDX60B
Page 2: ...SEW EURODRIVE Driving the world...
Page 142: ......
Page 143: ...SEW EURODRIVE Driving the world...







































































