




























Manual – MOVIDRIVE® MDX60B/61B Communication and Fieldbus Unit Profile
45
5
CANopen profile via CAN
CAN Interfaces of MOVIDRIVE® B
Parameter setting
procedure with
CAN
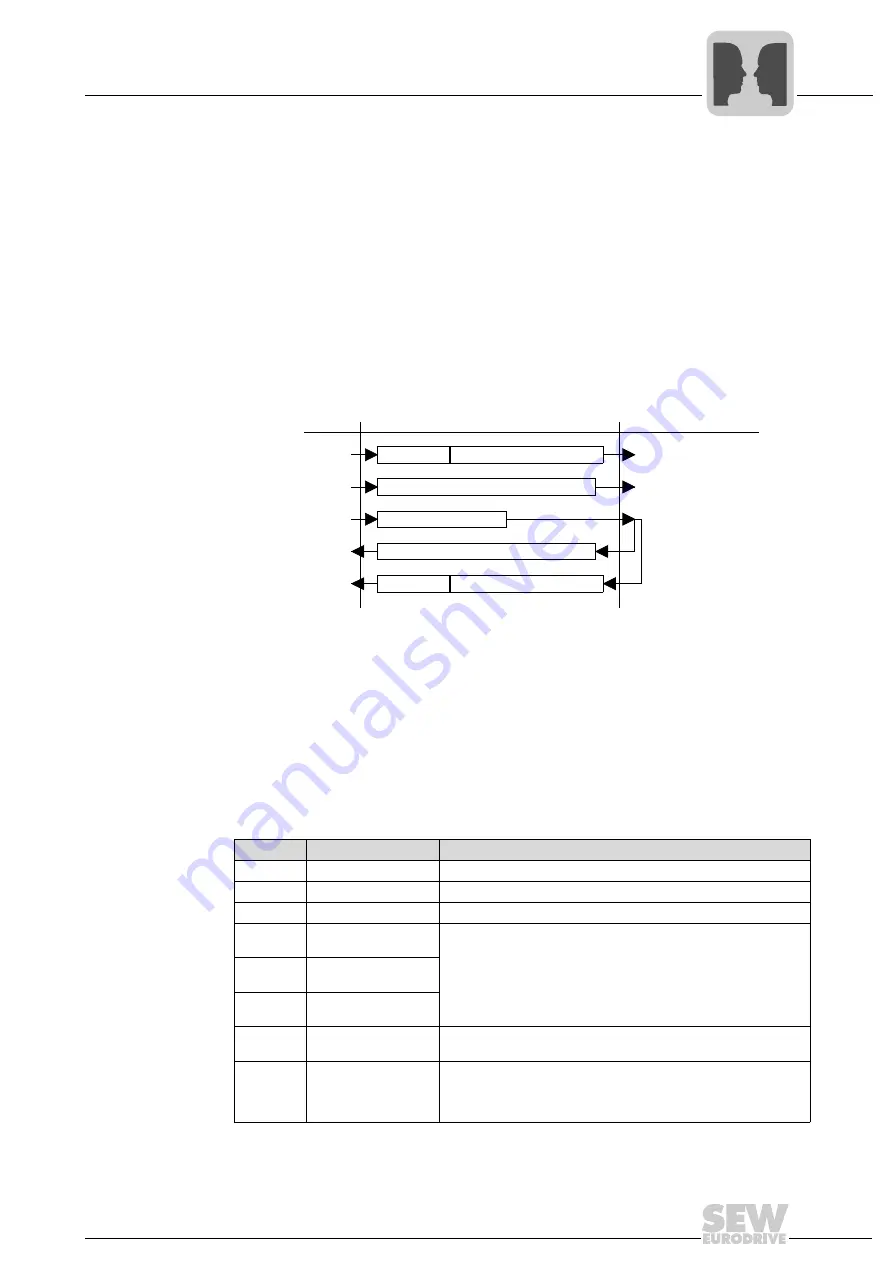
Taking the example of the WRITE SYNC service is intended to represent a process of
setting parameters between the controller and drive inverter via SBus-MOVILINK
®
(see
figure below). To simplify the process, the figure 16 only shows the management byte
of the parameter telegram.
While the controller prepares the parameter telegram for the WRITE SYNC service, the
drive inverter receives SYNC telegrams and also receives and returns process data
telegrams. The service is activated once the parameter request telegram has been
received. The drive inverter then interprets the parameter telegram and processes the
WRITE SYNC service. At the same time, it responds to all the process data telegrams.
The parameter response telegram is not sent until the SYNC telegram has been
received.
5.4
CANopen profile via CAN
CANopen communication is implemented according to the specification DS301 version
4.02 of CAN in automation (siehe www.can-cia.de). A specific unit profile, such as DS
402, is not implemented.
An EDS file for configuring CANopen master systems is available for download at
www.sew-eurodrive.de under "Documentation/Software".
The CANopen profile provides the following COB-ID (Communication Object Identifier)
and functions:
01028BEN
01110010
01110010
CAN
Control
(Master)
Drive Inverter
(Slave)
Process output data message
SYNC message
Process input data message
Receive request telegram
Receive process output data
SYNC telegram received;
parameter response
telegram and process input
data telegram are sent upon
receipt
Send parameter
telegram
Send process
output data
Send SYNC
telegram
Receive process
input data
Service was
performed correctly
Type
COB ID
Function and properties in MOVIDRIVE
®
NMT
000hex
Network management
Sync
080hex
Synchronous message with dynamically configurable COB ID
Emcy
0 node no.
Emergency message with dynamically configurable COB ID
Tx-PDO1
Rx-PDO1
node no.
node no.
For 10 process input data words (PI) that are mapped as required in
the TX-PDOs.
For 10 process output data words (PO) that are mapped as required
in the RX-PDOs.
Various transmission modes (synchronous, asynchronous, event)
Dynamically configurable length of PDOs
Tx-PDO2
Rx-PDO2
node no.
node no.
Tx-PDO3
Rx-PDO3
node no.
node no.
SDO
node no.
node no.
SDO channel for parameter data exchange with the CANopen
master
Guard-
ing/heart-
beat
node no.
Guarding and Heartbeat are supported:
•
Heartbeat producer
•
Heartbeat consumer (single)
•
Lifetime protocol (guarding)
Summary of Contents for MOVIDRIVE MDX60B
Page 2: ...SEW EURODRIVE Driving the world...
Page 142: ......
Page 143: ...SEW EURODRIVE Driving the world...







































































