




























84
Manual – MOVIDRIVE® MDX60B/61B Communication and Fieldbus Unit Profile
7
Process data description
SEW Unit Profile
Actual value
description of PI
data
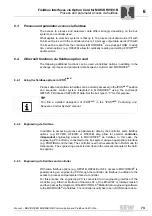
The parameters
Actual value description PI1 - PI3
define the content of the process
input data words transmitted by the drive inverter to the higher-level controller (see
figure below). Each process data word is defined with an individual parameter. There-
fore, three parameters are necessary for describing the process input data.
The following parameters can be transmitted across the process data channel using
process input data words PI1 to PI3. 32-bit values, such as the actual position, are trans-
mitted in two process data words. You can decide yourself in which process data word
the more significant part (high) and the less significant part (low) is transmitted.
55029AEN
Assignment
Meaning
Scaling
NO FUNCTION
Assigning a process input data word with
NO FUNCTION
means
that the inverter system does not update this process input data
word. In this case, MOVIDRIVE
®
returns the value 0000hex to the
higher-level controller.
SPEED
Set to
SPEED
, the drive inverter returns the current actual speed
in rpm to the higher-level automation system.
The actual speed can only be sent back properly if the inverter
can determine the actual motor speed via speed feedback. For
applications with slip compensation, the deviation from the real
motor speed solely depends on the accuracy of the slip compen-
sation set by the user.
1 digit = 0.2 / min
OUTP.CURRENT
With the setting
OUTPUT CURRENT
, the drive inverter returns
the current actual value of the output current in [% I
n
] to the
higher-level automation system (in percent, with reference to the
rated current of the drive inverter).
1 digit = 0.1 % I
N
ACTIVE
CURRENT
By assigning a process input word
ACTIVE CURRENT
, the
inverter provides the actual active current value in % I
N
to the
higher-level automation system.
1 digit = 0.1 % I
N
POSITION LO / HI The actual position values must be divided into two process data
words because the position is transmitted as integer32. This
means you have to specify both the
actual position value high
and
the
actual position value low
. The drive inverter only provides
valid actual position values in operating modes with speed feed-
back.
STATUS WORD
1/
STATUS WORD 2
Assigning status word 1 or status word 2 to the process input data
allows for accessing status information as well as fault and refer-
ence messages.
SPEED [%]
Set to
SPEED [%]
, the drive inverter returns the current actual
speed in % n
max
/ P302 to the higher-level automation system.
4000
hex
= 100 % n
max
PI 1
PI 2
Process input data
PI 3
Status word 1
Status word 2
Act. speed value
Act. app. current
etc.
Status word 1
Status word 2
Act. speed value
Act. appar. curr.
etc.
Status word 1
Act. speed value
Act. apparent curr.
etc.
P876: ACT.VAL.DESCR. PI3
P875: ACT.VAL. DESCR. PI2
P875: ACT.VAL. DESCR. PI1
Status word 2
Summary of Contents for MOVIDRIVE MDX60B
Page 2: ...SEW EURODRIVE Driving the world...
Page 142: ......
Page 143: ...SEW EURODRIVE Driving the world...







































































