




























Manual – MOVIDRIVE® MDX60B/61B Communication and Fieldbus Unit Profile
85
7
Process data description
SEW Unit Profile
Scaling of
process data
The process data are always transmitted as fixed-point values to make for simple calcu-
lation in the ongoing system process. Parameters with identical units of measurement
receive the same scaling so that the higher-level automation device can directly
compare the set and actual values in the application program. There are the four differ-
ent process data types:
• Speed in rpm
• Current in % I
N
(rated current)
• Ramp in ms
• Position in increments.
The different versions of the control or status word are coded as bit field and will be
described in a separate chapter.
IPOS PI-DATA
Set to
IPOS PI
(IPOS Process Input Data), an individual actual
value can be transmitted from the IPOS
plus®
program to the
higher-level controller via process input data. This setting allows
for exchanging up to 48 individually coded bits between the
IPOS
plus®
program and the higher-level controller using the
process data channel.
You can directly write process input data in IPOS
plus®
using the
command
SetSys PI-Data
. For more detailed information, refer to
the IPOS
plus®
positioning and sequency control system manual.
Three words with
individually
coded 16 bits
each can be
exchanged
between the
higher-level
controller and
IPOS
plus®
.
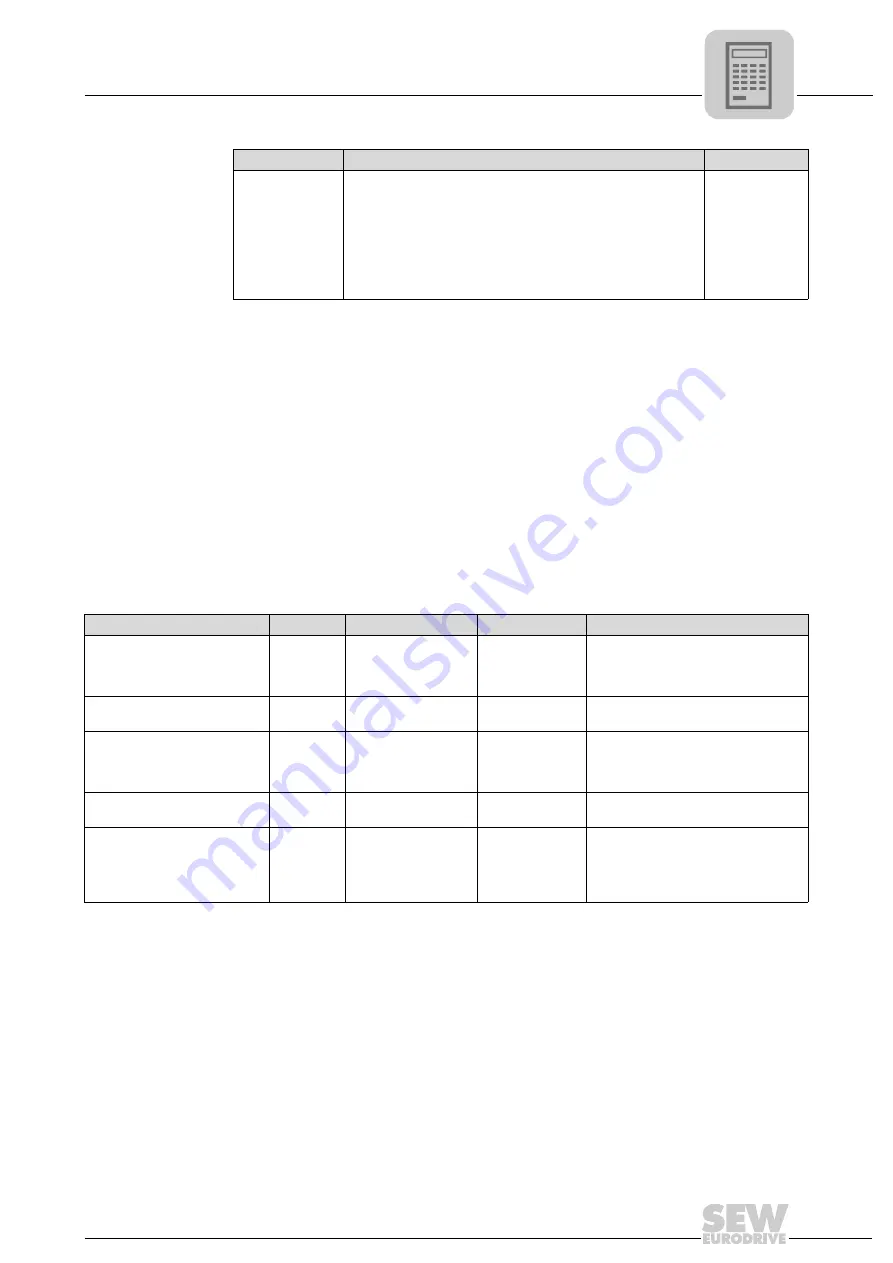
Assignment
Meaning
Scaling
Process data
Type
Resolution
Reference
Range
Speed setpoint /
Actual speed value /
Speed limiting slip
compensation
Integer 16
1 digit = 0.2 rpm
-6553.6 ... 0 ... +6553.4 rpm
8000
hex
... 0 ... 7FFF
hex
Relative speed setpoint [%] /
Relative actual speed value [%]
Integer 16
1 digit = 0.0061%
(4000
hex
= 100%)
Maximum speed
of the inverter
- 200% ... 0 ... + 200 % - 0.0061%
8000
hex
...0 ... 7FFF
hex
Apparent current actual value /
Actual active current value /
Current setpoint
Current limitation
Integer 16
1 digit = 0.1 % I
N
Rated current of
the drive inverter
-3276.8% .... 0 ..... +3276.7%
8000
hex
.... 0 ..... 7FFF
hex
Process ramp up /
Process ramp down
Unsigned
16
1 digit = 1 ms
delta-f = 100 Hz
0 ms ... 65535 ms
0000hex ... FFFF
hex
Actual position value /
Position setpoint
Integer 32
1 motor revolution =
4096 increments, i.e.
1 digit = 360°/4096
-188.743.680° .... 0 ..... +188.743.679°
-524 288 .... 0 .... +524287 motor revo-
lutions
8000 0000
hex
... 0 ... 7FFF FFFF
hex
high low
high low
Summary of Contents for MOVIDRIVE MDX60B
Page 2: ...SEW EURODRIVE Driving the world...
Page 142: ......
Page 143: ...SEW EURODRIVE Driving the world...







































































