





























Manual – MOVIDRIVE® MDX60B/61B Communication and Fieldbus Unit Profile
109
7
Setting the inverter parameters
SEW Unit Profile
7.6.3
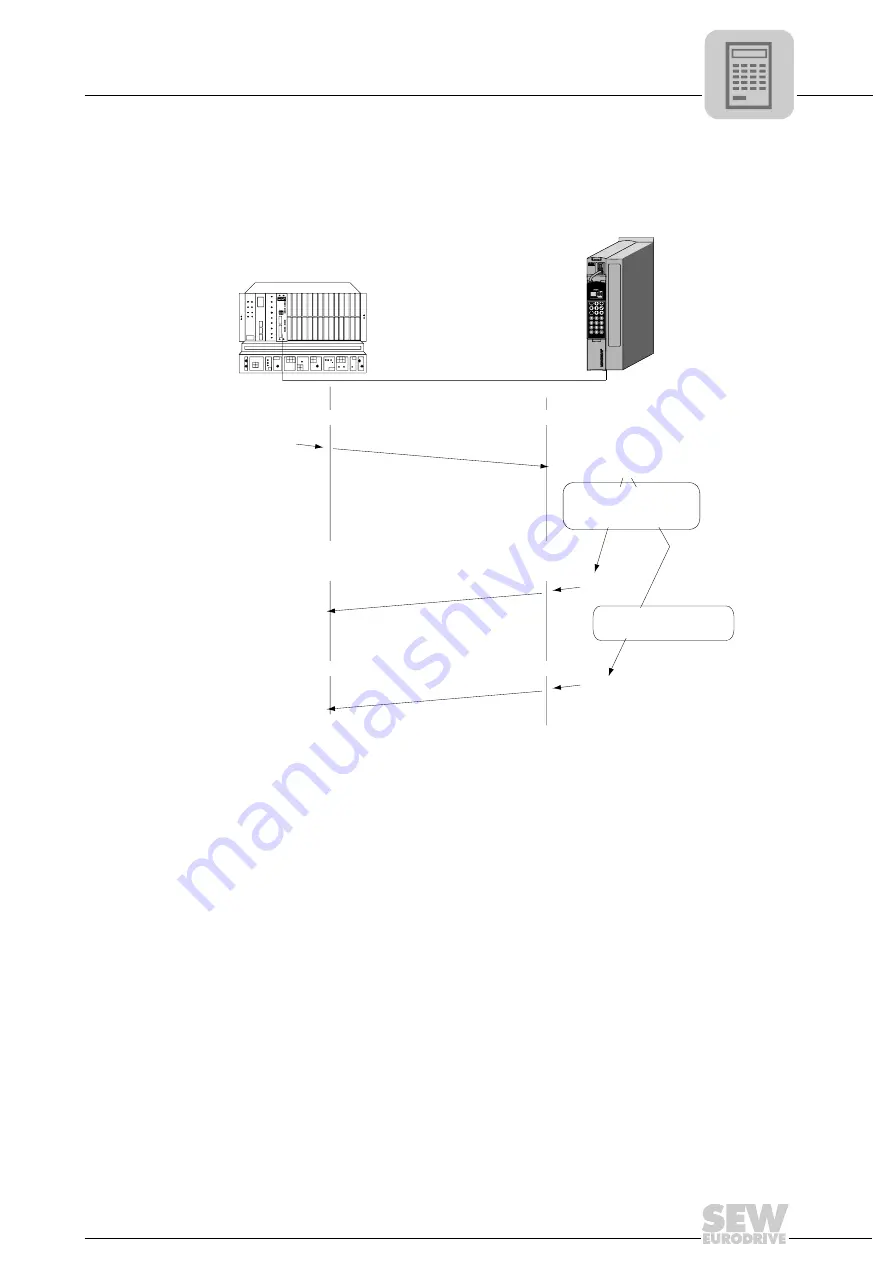
Example: Reading a parameter (READ)
A parameter is read via communication interfaces with a
read request
from the
programmable controller of the MOVIDRIVE
®
inverter (see figure below).
If the read service cannot be executed in the drive inverter, the programmable controller
will receive a
negative read response
. In this way, the programmable controller receives
a negative acknowledgement
(read error confirmation)
with exact identification of the
error.
Reading a
parameter
cyclically
For the cyclic transmission method, the handshake bit has to be changed to activate
service processing (execution of READ service). When using acyclic PDU types, every
inverter processes every request telegram and in this way always executes the
parameter channel.
The parameters are set as follows:
1. Enter the index of the parameter to be read in byte 2 (index high) and byte 3 (index
low).
2. Enter the service identifier for the read service in the management byte (byte 0).
3. With cyclic PDU types, the read service is not passed to the inverter until the hand-
shake bit is changed. With acyclic PDU types, the parameter channel is always
executed.
54674AEN
READ (8470)
OK + data of index 8470
Error + Return code
CLIENT
SERVER
Read
request
Read
confirmation
Read error
confirmation
O R
Negative
read response
Read response
Read indication
2b. Error occurred!
No data available
2a. Parameter index
8470 is read by the
inverter.
1. Read request (e.g. read ramp t11 up CW = Index 8470
3a. Read request is responded with the data (e.g. 0.5 s)
3b. Read service faulty, more details in the return code
Summary of Contents for MOVIDRIVE MDX60B
Page 2: ...SEW EURODRIVE Driving the world...
Page 142: ......
Page 143: ...SEW EURODRIVE Driving the world...






































































