





























Manual – MOVIDRIVE® MDX61B Synchronous Operation Board DRS11B
23
5
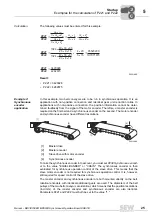
Testing synchronous operation with assembled drives
Startup
Parameter set-
tings for synchro-
nous operation
•
Parameter settings for master and slave gear ratio factors (P221 and P222):
– If the drive configuration is identical (encoder, gear unit, etc.), accept the default
values for P221 and P222.
– For any other configuration, you can determine the settings for P221 and P222
according to the following formula:
•
Enable the master and slave drive. Both drives should now run at a synchronous
angle.
5.5
Testing synchronous operation with assembled drives
•
Mount both drives on your machine and align the drives mechanically.
•
Delete the angle error using the "Set DRS zero point" function.
•
Enable both drives in accordance with the wiring diagram.
•
During travel, observe the LED "SYNC" on the synchronous operation board. This
allows you to determine the current angle error between the master and slave:
– If LED "SYNC" lights up during acceleration and deceleration, the angle error
exceeds the tolerance set in parameter P514.
– You can record and determine the exact angle error using the "SCOPE" function
integrated in MOVITOOLS
®
.
•
Optimize the P gain of synchronous operation control (P220) as follows:
– Run the system with the maximum permitted load for operation.
– Increase P220 in small steps from 1 - 2. While doing so, observe the control
response of the slave.
– Increase P220 until the slave drive tends to oscillate.
– Now reduce P220 by 15 % and take the result as the value for P220.
You can optimize the value even further using the "SCOPE" function integrated in
MOVITOOLS
®
.
•
Adapt the parameters for monitoring synchronous operation control according to
your requirements.
56534AXX
A
M
, A
S
Resolution of the encoder master, slave
i
M
, i
S
Gear unit reduction ratio of master, slave
iv
M
, iv
S
Additional gear ratio of master, slave
U
M
, U
S
Circumference of master, slave output elements
P221
P222
=
A
M
x
i
M
iv
M
A
S
x
i
S
iv
S
U
S
U
M
x
x
0
0
I







































































