




























Manual – MOVIDRIVE® MDX61B Synchronous Operation Board DRS11B
25
5
Examples for the calculation of P221 and P222
Startup
Calculation
The following values must be entered for this example:
Result:
•
P221 = 3420928
•
P222 = 4282875
Example 2:
Synchronous
encoder
application
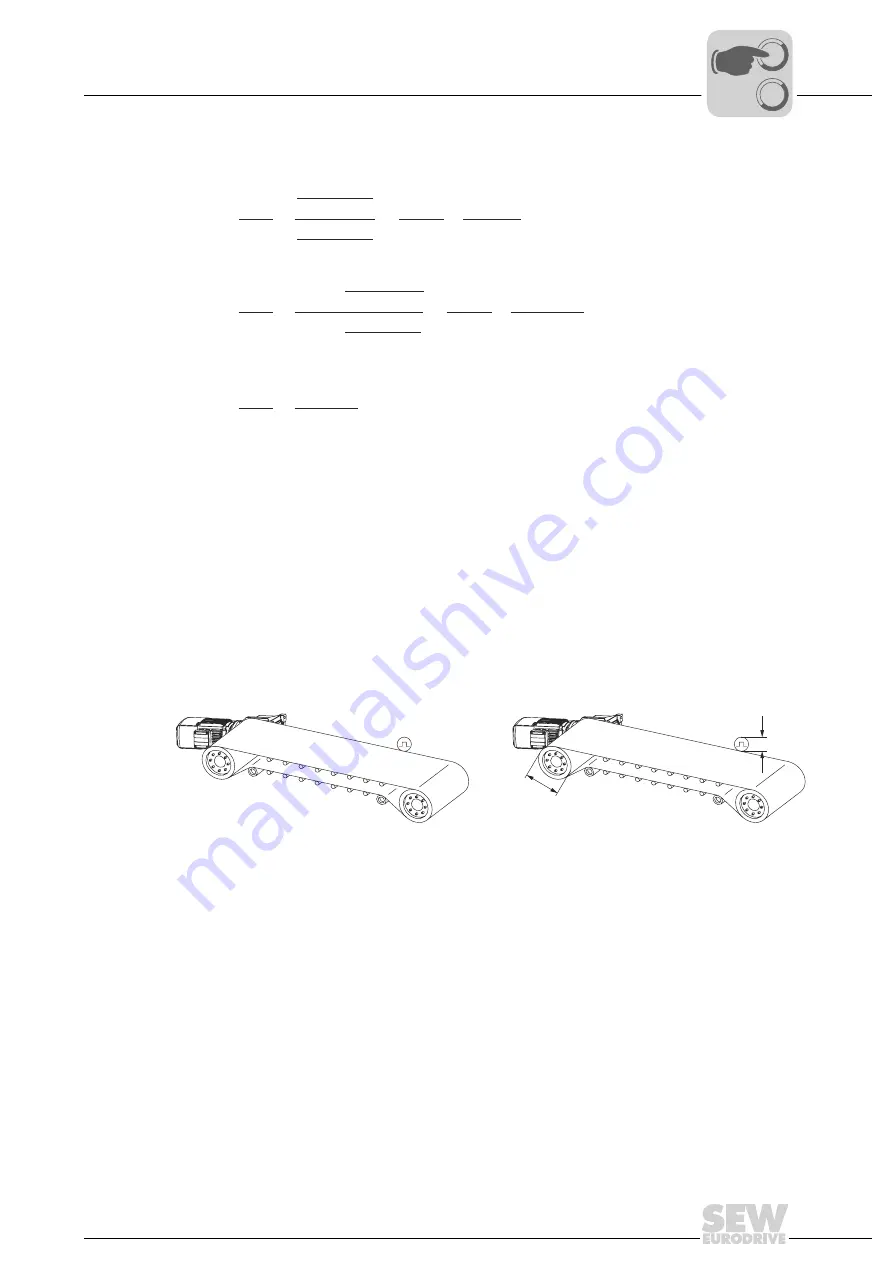
In this example, two belt conveyors are to be run in synchronous operation. It is an
application with non-positive connection and identical gear unit reduction ratios. In
applications with non-positive connection, the position information cannot be deter-
mined faultlessly from the signal of the motor encoder. Therefore, a master encoder is
required on the first belt and a synchronous encoder on the second. The motor encoder
and synchronous encoder have different resolutions.
To take the synchronous encoder into account, you must set
P230 Synchronous encod-
er
to the value "EQUAL-RANKED" or "CHAIN." The synchronous encoder is then
evaluated for synchronous operation control of the slave drive. This means that the
slave motor encoder is not required for synchronous operation control. It is, however,
still required for speed control of the slave drive.
The master encoder and synchronous encoder are both mounted directly on the belt.
Identical encoders with identical additional gears are used. The diameters of the belt
pulleys of the two belt conveyors are identical, which means that the position resolutions
(incr./mm) of the master encoder and synchronous encoder are also identical.
Parameters P221 and P222 must both be set to the value "1."
56531AXX
P221
P222
=
=
A
M
x
i
M
A
M
x
i
M
π
x
m
M
x
Z
M
A
S
x
i
S
A
S
x
i
S
m
S
x
Z
S
m
M
x
Z
M
π
x
m
S
x
Z
S
x
P221
P222
=
=
x
1024
40
x
33
x
83
25
x
8
x
15
47
x
33
x
81
4
x
20
5
x
15
85523200
107071875
23
x
8
x
14
x
1024
x
P221
P222
=
3420928
4282875
56515AXX
SEW
SEW
d
M
d
S
[1]
[3]
[2]
[4]
[1]
Master drive
[2]
Master encoder
[3]
Slave drive with motor encoder
[4]
Synchronous encoder
0
0
I







































































