
























12
Manual – MOVIDRIVE® MDX61B Synchronous Operation Board DRS11B
3
Synchronous operation with synchronous encoder
Project planning
3.5
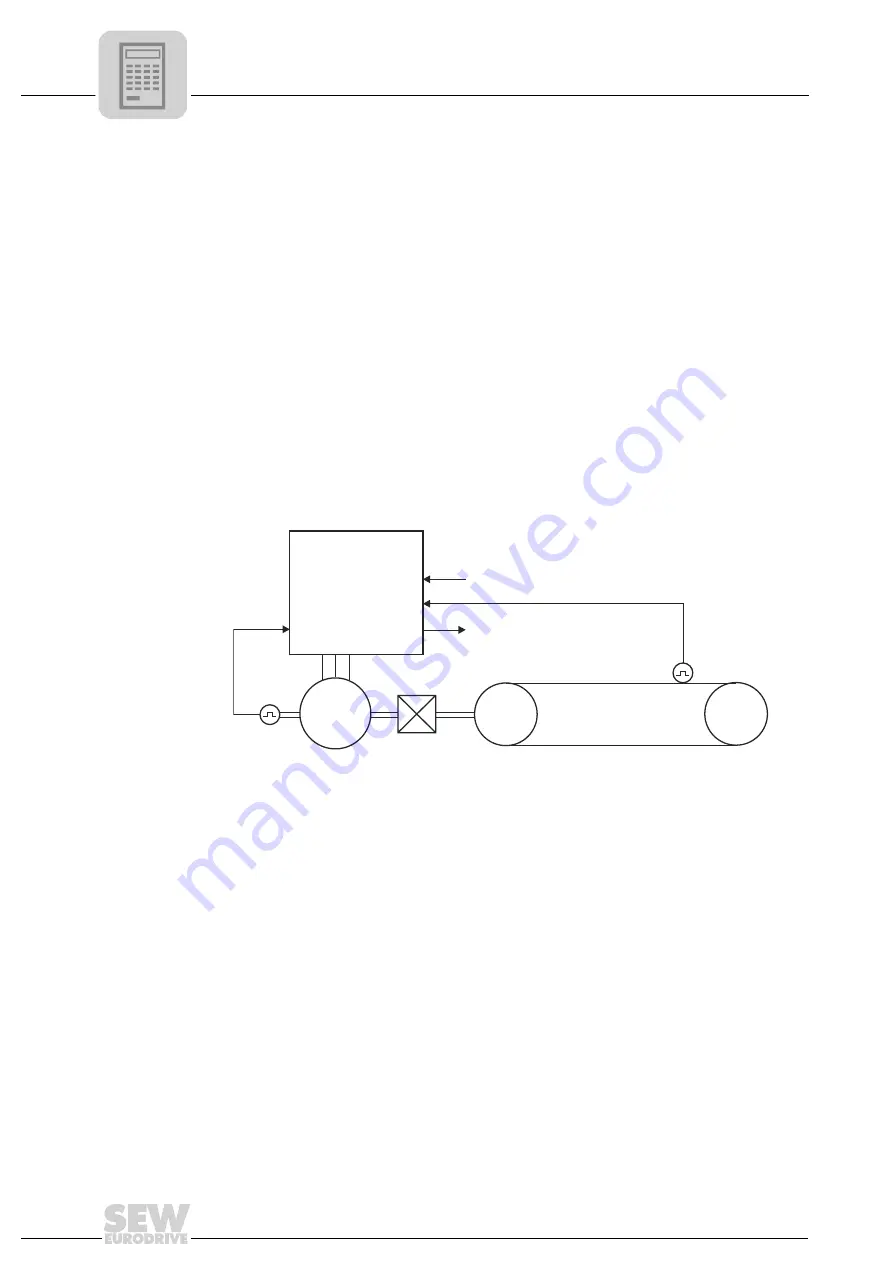
Synchronous operation with synchronous encoder
Position measurement has to be carried out via an extra incremental encoder in all
applications in which power transmission between the motor shaft and the machine is
non-positive and thus slip is to be expected. This incremental encoder must be installed
on the moving machine component with a positive connection. In the following section,
this encoder is referred to as a synchronous encoder. The synchronous encoder is
needed to record the current position of the slave (G2). The encoder installed on the
motor shaft is still used to record the current speed (G1) of the drive.
The higher the resolution of the encoder (number of pulses counter per travel unit), the:
•
more accurately the slave can follow the master
•
more rigidly the synchronous operation control can be set (large P factor)
•
smaller the angle error will be during acceleration and deceleration
However, due to the calculation accuracy of the synchronous operation controller, the
ratio of the position resolutions (incr./mm) between the motor encoder and synchronous
encoder should lie in the range 0.1 ... 10. If the ratio is outside of this range, in many
cases a different synchronous encoder additional gear can be used for a more favorable
ratio.
•
Setting the master / slave gear ratio factor
→
Sec. 6.3
•
Setting the slave encoder / slave synchronous encoder factor
A mechanical gear ratio can be set between the incremental encoder to record the
motor speed (G1) and between the incremental encoder for position measurement
(G2). This gear ratio is set with parameter P231 (factor slave encoder) / P232 (Factor
slave sync. encoder).
– Equal-ranked
The signal of the master encoder at X42 is passed to the next slave via X43. In
this way, all slaves receive identical master encoder signals.
– Chain:
The signal of the synchronous encoder at X41 is passed to the following slaves
via X43. In this way, the synchronous encoder signal becomes the master
encoder signal of the following slave.
56512AEN
Figure 1: Synchronous operation with synchronous encoder; equal-ranked or chain
MOVIDRIVE
®
Slave
X15
DEH11B
DER11B
M
G2
X41
X42
DRS11B
X43
G1
Motor enc.
Gear unit
ratio i
synchr. encoder
X42 (next slave drive)
Master encoder







































































