



















Dobot M1 User Guide
7
Maintenance
Issue V1.0.4 (2018-01-31)
User Guide
Copyright © Yuejiang Technology Co., Ltd
105
After replacing the battery, the position data on the Encoder will be lost. It is
necessary to reset Rear Arm Encoder, Forearm Encoder, Z-axis Encoder and R-axis
Encoder respectively.
Click
Initialization.exe
in
the
installation
directory/
M1Studio/tools/Initialization directory.
The M1Studio tool page is displayed.
Select the corresponding serial port from the serial drop-down list, and click
Connect
.
If
Connect
turns to
Disconnect
, the connection is successful, and Dobot M1
can be controlled by M1Studio.
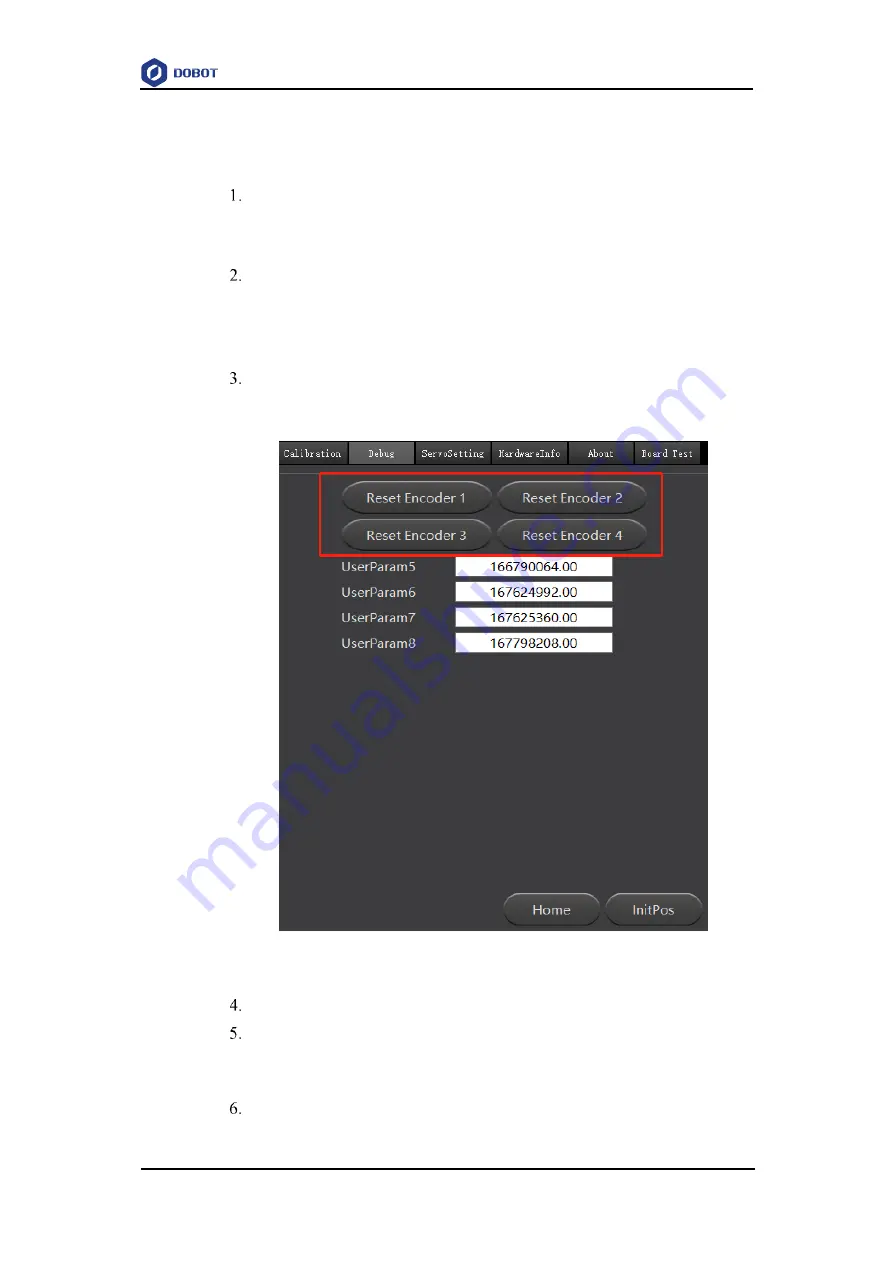
Click
Reset Encoder1
,
Reset Encoder2
,
Reset Encoder3
, and
Reset
Encoder4
respectively on the
Debug
page to reset J1 Encoder, J2 Encoder, J3
Encoder and J4 Encoder, as shown in Figure 7.15.
Figure 7.15 Reset Encoders
Restart Dobot M1.
Check whether encoders are reset on the
Debug
page. Please check the default
values of the encoders (
UserParam5
to
UserParam8
). If the values range from
163790000
to
196548000
, the operation is successfully.
Select the corresponding serial port from the serial drop-down list, and click
Connect
.






































































