





























Dobot M1 User Guide
6
Operation
Issue V1.0.4 (2018-01-31)
User Guide
Copyright © Yuejiang Technology Co., Ltd
91
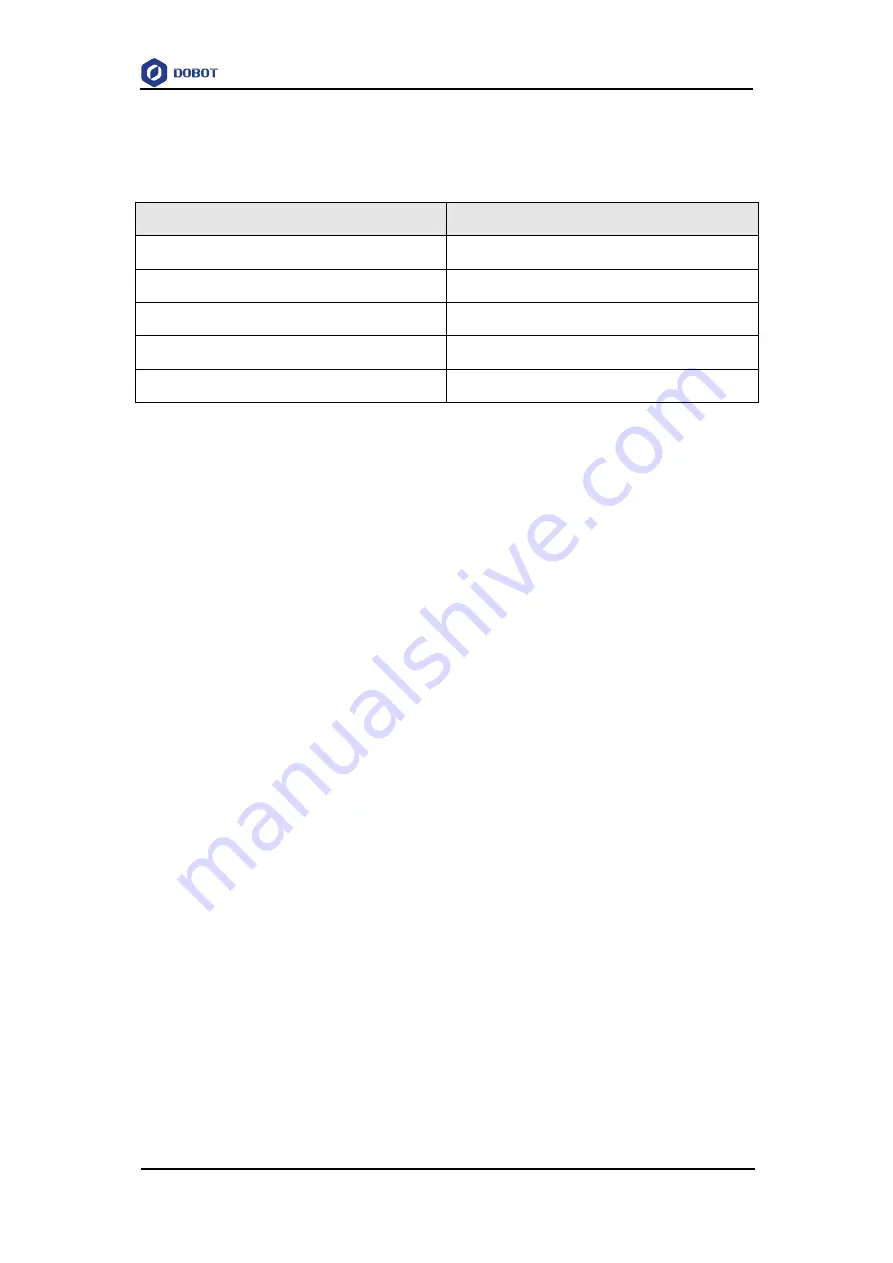
to the origin stays constant when moving Dobot M1. Table 6.10 lists how to calculate each Joint
coordinate after switching the arm orientation at the same point.
Table 6.10 Joint coordinate calculation
Before
After
R=J1+J2+J4
R’=R=J1’+J2’+J4’
J1
J1’=J1+J2
J2
J2’=-J2
J3
J3’=J3
J4
J4’=R-J1’-J2’
As shown in Table 6.10, If the J1-coordinate is 10° and the J2-coordinate is 90° before
switching the arm orientation, the J1-coordinate will change to 100° after switching, resulting in an
alarm about limit generated. In real application scenario, if the two successive saved points are the
same, only different in arm orientations, please notice the coordinates of J1 and J4. You can calculate
J1-coordinate and J4-coordinate according to Table 6.10, in order to avoid generating an alarm about
limitation.




































































