





























Dobot M1 User Guide
6
Operation
Issue V1.0.4 (2018-01-31)
User Guide
Copyright © Yuejiang Technology Co., Ltd
57
in JUMP and MOVJ mode.
In MOVJ or JUMP mode, if the two points are the same, only different in arm
orientations, J1 or J4 may be limited when moving Dobot M1, resulting in an alarm
generated. You need to modify and resave the point for which the alarm is generated,
and then clear the alarm manually.
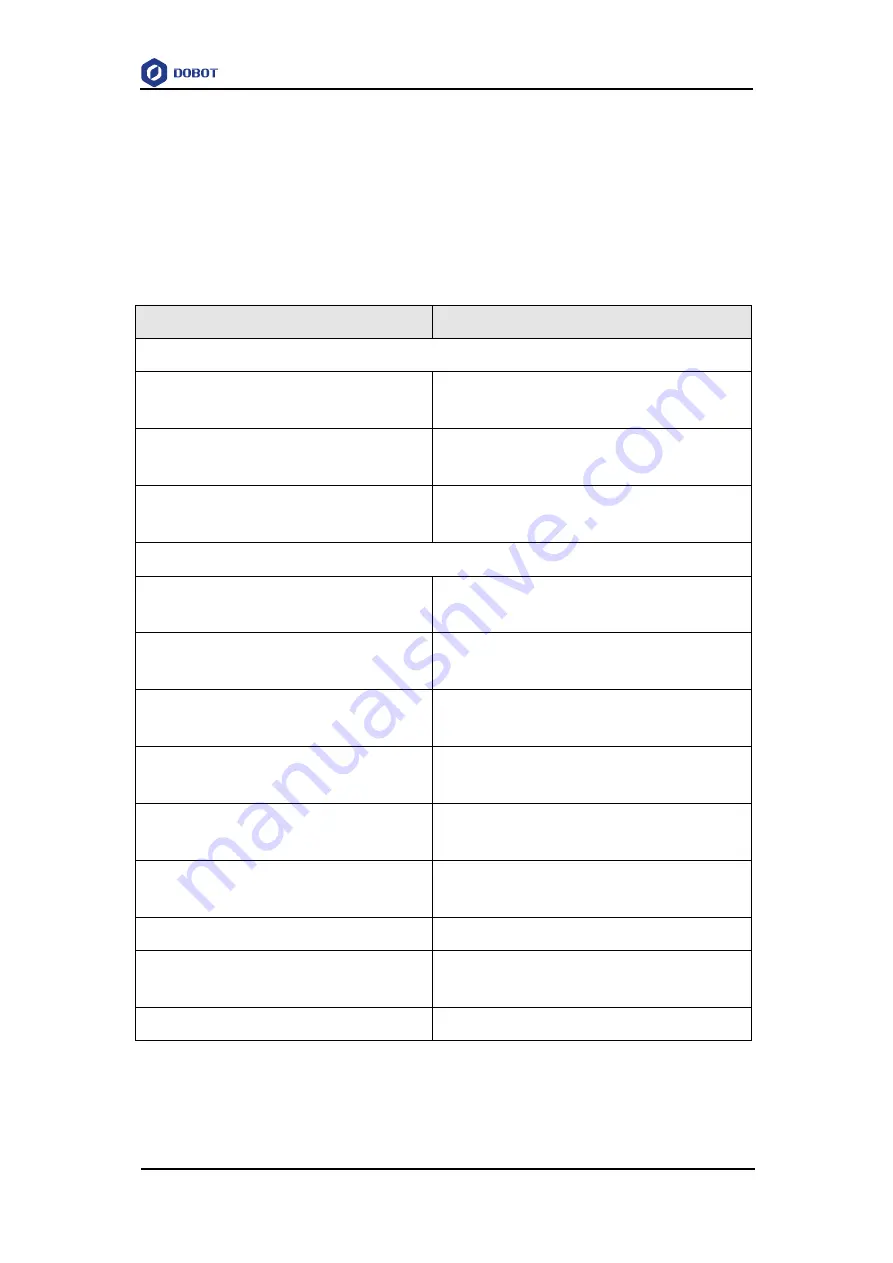
Table 6.2 Alarm Description
Alarm Condition
Clear method
Jogging
The Joint coordinate is limited
Jog the limited Joint coordinate towards the opposite
direction, and the alarm will be automatically cleared
The Cartesian coordinate is limited
Jog Joint coordinate towards the opposite direction, and
the alarm will be automatically cleared
The point is at the singular position when clicking
the Cartesian coordinate buttons
Jog joint2, and the alarm will be automatically cleared
Playback
The starting point or the end point is a singular point
in MOVL mode
Clear the alarm manually and modify the point
A point in the trajectory is a singular point in MOVL
mode
Clear the alarm manually and modify the point
Modify the arm orientation of the saved point in
MOVL mode
Clear the alarm manually and modify the arm orientation
The middle point or the end point is a singular point
in ARC mode
Clear the alarm manually and modify the point
A point in the trajectory is a singular point in ARC
mode
Clear the alarm manually and modify the point
Any two of the three points of the arc are coincided
in ARC mode
Clear the alarm manually and modify the point
The three points of the arc are in a line in ARC mode
Clear the alarm manually and modify the point
The trajectory is out of range of the workspace in all
modes
Clear the alarm manually and modify the point
The joint is limited in all modes
Clear the alarm manually and modify the point
The method how to clear the alarm is shown as follows.
Prerequisites
Dobot M1 has been powered on.






























































