





























138
6.6.5. Adjustment of speed loop gain
There are some parameters related to inner speed control loop for users to adjust. Set the value
of the PA02 to use the auto-gain tuning function or manual-gain tuning function. If auto-gain tuning
function is performed, the load inertia ratio would be approximated continuously and the control gain
value would be set automatically. If manual-gain gain tuning is performed, users have to enter the
proper value of the load inertia ratio and control gain value. At this time, all automatic or auxiliary
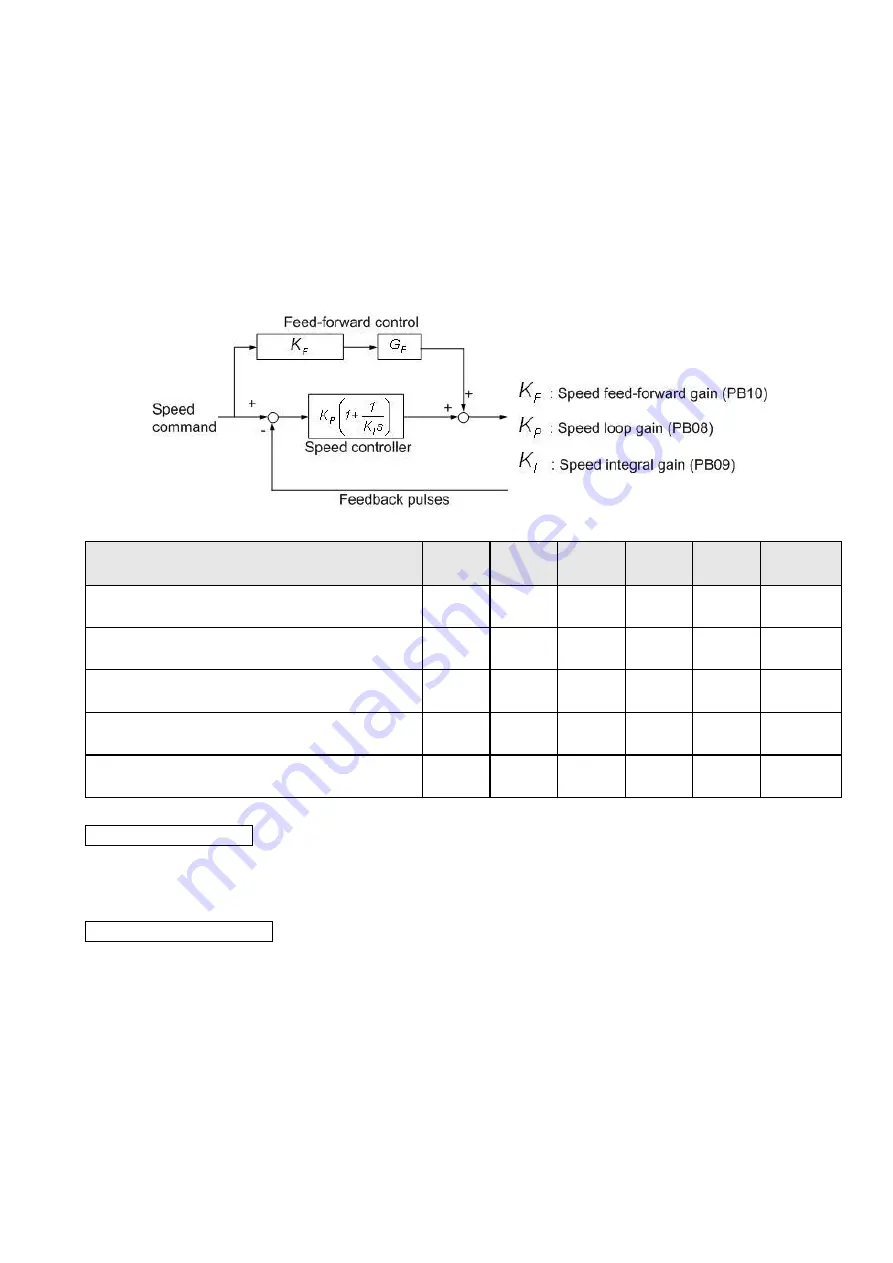
functions about inner speed control loop would be disabled. The block diagram of inner speed control
loop is presented as follows:
Parameters and settings related of this mode are presented below.
Name
Name
Abbr.
Sign
Setting
range
Unit
Default
Control
mode
Gain tuning mode option
ATUM
PA02
0000h
~0003h
---
0002h
Pt, Pr, S
Auto-tuning response level setting
ATUL
PA03
0001h
~000Fh
---
0005h
Pt, Pr, S
Speed loop gain
VG1
PB08
40
~4096
rad/s
817
Pt, Pr, S
Speed integral gain
VIC
PB09
1
~1000
ms
48
Pt, Pr, S
Speed feed-forward gain
VFG
PB10
0
~20000
0.0001
0
S
Auto-gain tuning mode
The drive would tune the optimum gains during the acceleration/deceleration route. Refer to
section 5.3.2 for further details.
Manual-gain tuning mode
When the PA02 value is 0000h or 0001h, the effective parameters are: speed loop gain(PB08),
speed integral gain(PB09) and speed feed-forward gain (PB10). When PA02 is set as 0001, the servo
drive would automatically enable an interference compensator. This function could reduce torque
ripple, overshoot and speed ripple. It is suitable for systems with load changed violently. Besides, users
should avoid applying this compensator on the system which the ratio of load inertia to motor shaft is
greater than 10 times. If necessary, the related parameters should be adjusted according to the various
cases. The schematic diagram is as follows.
Summary of Contents for SDE Series
Page 13: ...5 1 6 Function block diagram ...
Page 26: ...18 3 3 3 CN1 pin name list ...
Page 223: ...215 SME L040 SME L075 SME L100 SME L150 ...
Page 224: ...216 SME L200 SME L300 SME M100 SME M150 Continuous running range ...
Page 227: ...219 ...
Page 231: ...223 4 Wiring example with peripheral equipment CN2 Encoder socket ...
Page 242: ...234 12 4 Version information Version V1 01 Issue date Aug 2017 Proofreader Yaochou Shu ...







































































