





























139
Parameters for manual-gain tuning mode
Speed loop gain
:
Increasing this parameter would improve the bandwidth of speed control loop, but a too large
value would cause the mechanism vibration. Therefore, it is recommended to operate the auto-gain
tuning mode to approximate a proper value at first. If the value could not satisfy the requirement, to
increase this value gradually until the mechanism vibration occurred.
Speed integral gain
:
Decreasing this parameter would improve the low-frequency rigidity of speed control loop and
reduce the speed stability errors. On the other hand, a too small value would cause the phase delay to
make an instable system.
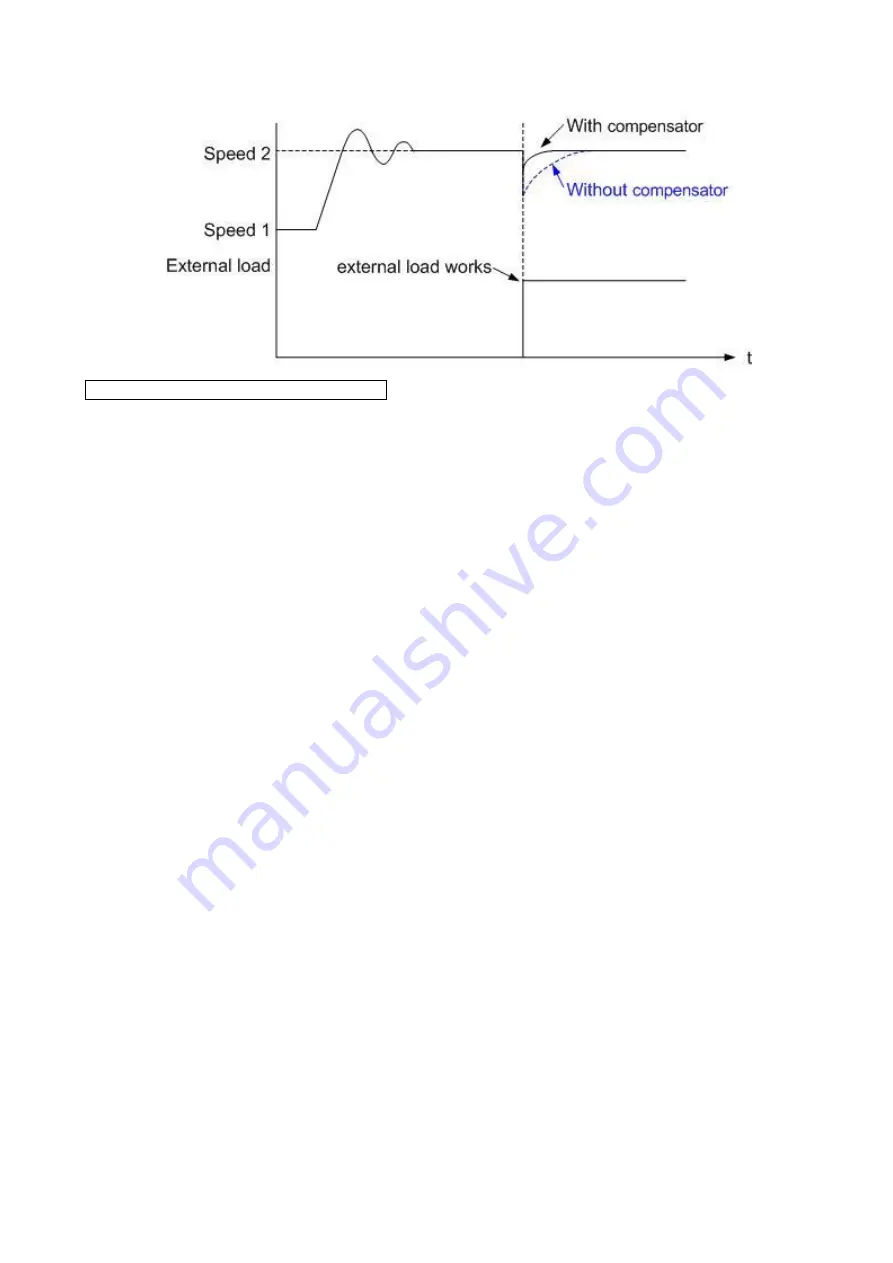
Speed feed-forward gain
:
The speed feed-forward gain could reduce the phase lag errors, and increase the traceability. If
the setting value is near 1, the dynamic tracking error would be very small and the pre-compensation
will be the most completed. If the setting value is too low, the improvement would not obvious. But a too
high value would cause the system vibration easily.
Summary of Contents for SDE Series
Page 13: ...5 1 6 Function block diagram ...
Page 26: ...18 3 3 3 CN1 pin name list ...
Page 223: ...215 SME L040 SME L075 SME L100 SME L150 ...
Page 224: ...216 SME L200 SME L300 SME M100 SME M150 Continuous running range ...
Page 227: ...219 ...
Page 231: ...223 4 Wiring example with peripheral equipment CN2 Encoder socket ...
Page 242: ...234 12 4 Version information Version V1 01 Issue date Aug 2017 Proofreader Yaochou Shu ...







































































