




























153
6.7.5. Torque limit of position control mode
See section 6.6.4 for details.
6.7.6. Position loop gain
If users need to use manual-gain tuning for position loop, to set parameters of speed loop (see Section
6.6.5) is priority since position loop is outside control of speed loop. Then users could set proportion
gain and feed-forward gain of position loop. Usually, position gain is 1/4~1/6 value of the speed loop
gain. Users could also use auto-gain tuning mode to set the gains of position and speed loop
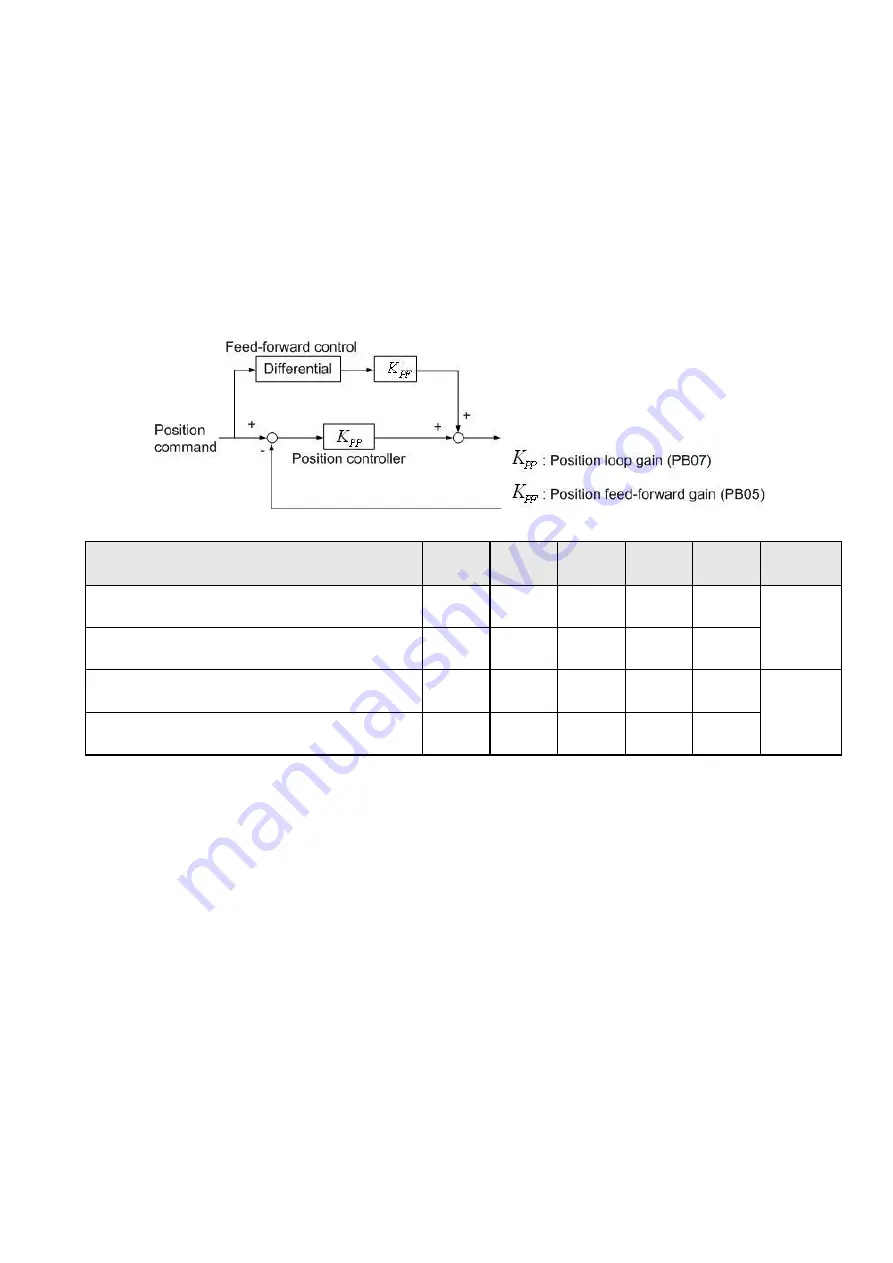
automatically. Position loop block diagram is presented below.
Parameters related to position gain adjustment are listed below.
Name
Name
Abbr.
Sign
Setting
range
Unit
Default
Control
mode
Gain tuning mode option
ATUM
PA02
0000h
~0004h
-
0002h
ALL
Auto-tuning response level setting
ATUL
PA03
1
~32
-
10
Position feed-forward gain
FFC
PB05
0
~200
%
0
Pt, Pr
Position loop gain
PG1
PB07
4
~1024
rad/s
45
If PG1 (PB07) is set too large, the motor would generate vibration even though the bandwidth and
response are becoming faster. These phenomena are not permitted for occasions requiring an
accurate position control. In this case, be sure to reduce PG1 value to prevent motor vibration. If the
bandwidth limited due to mechanism factors causes a bad traceability, position feed-forward gain could
be used to reduce the dynamic error of position tracking. On the other hand, the usage of feed-forward
control also relatively increases the position settling time.
The method for adjusting position feed-forward gain is to increase the value gradually. Theoretically, 1
is the best setting value. The improper value would cause machine vibration easily. In such case, users
should decrease the position feed-forward gain to meet a vibration-free situation.
Summary of Contents for SDE Series
Page 13: ...5 1 6 Function block diagram ...
Page 26: ...18 3 3 3 CN1 pin name list ...
Page 223: ...215 SME L040 SME L075 SME L100 SME L150 ...
Page 224: ...216 SME L200 SME L300 SME M100 SME M150 Continuous running range ...
Page 227: ...219 ...
Page 231: ...223 4 Wiring example with peripheral equipment CN2 Encoder socket ...
Page 242: ...234 12 4 Version information Version V1 01 Issue date Aug 2017 Proofreader Yaochou Shu ...







































































