





























Parameter Description
Parameters
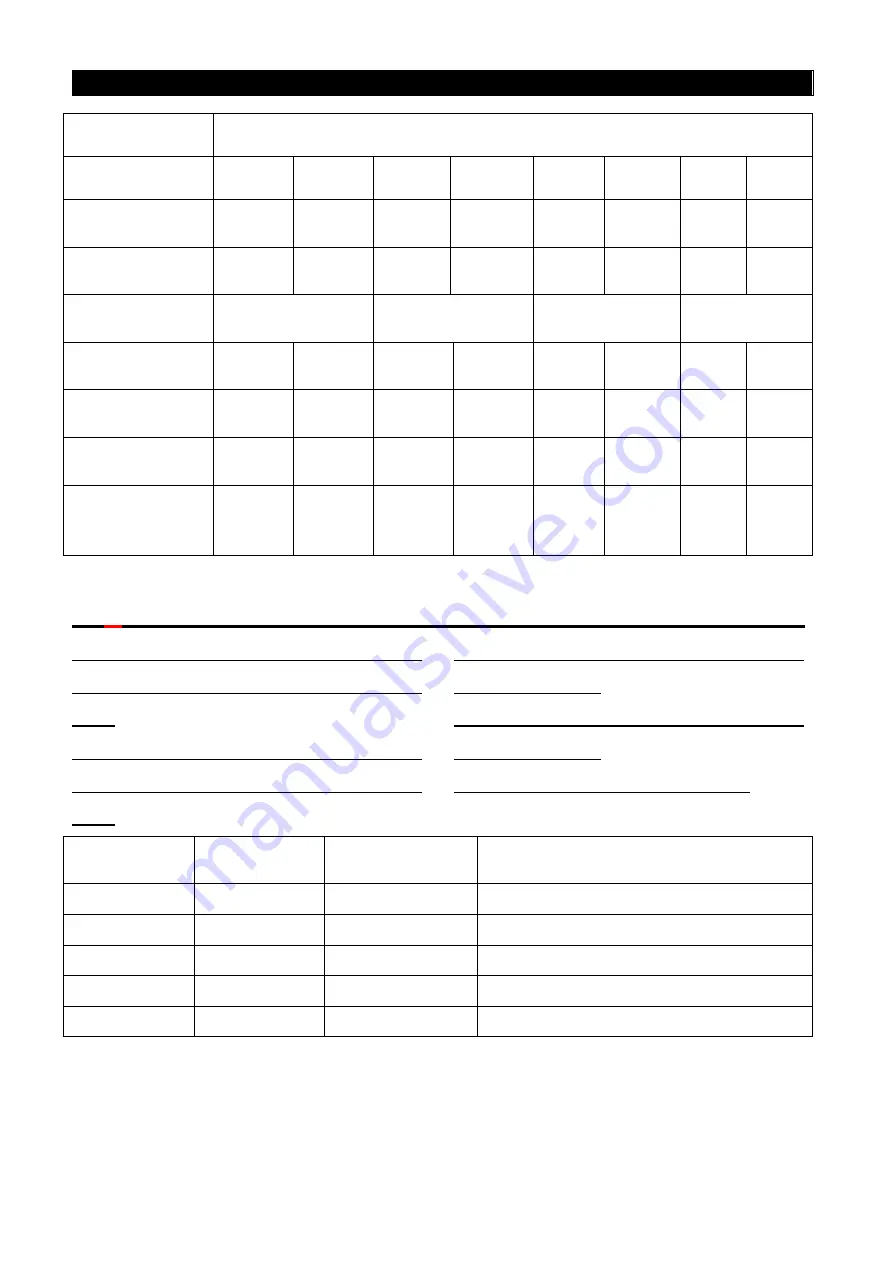
178
Operating Condition
Run Command
Forward
Reverse
Forward
Reverse
Forward
Reverse Forward Reverse
Torque Reference
Direction
+
+
-
-
+
+
-
-
Speed Limit
Direction
+
-
-
+
-
+
+
-
Normal Operation
Direction
Forward
Reverse
Forward
Reverse
Normal Speed Limit
(P.407=0,P.406=0)
P.402
+ P.403
P.402
+ P.403
P.402
+ P.403
P.402
+ P.403
P.403
P.403
P.403
P.403
Normal Speed Limit
(P.407=1,P.406=0)
P.402
P.402
P.402
P.402
P.403
P.403
P.403
P.403
Normal Speed Limit
(P.407=0,P.406=1)
Frequency
+ P.403
Frequency
+ P.403
Frequency
+ P.403
Frequency
+ P.403
P.403
P.403
P.403
P.403
Normal Speed Limit
(P.407=1,P.406=1)
Frequency
Frequency
Frequency
Frequency
P.403
P.403
P.403
P.403
5.8
3
HDI terminal input signal (P.522~P.526)
P.522 “The setting corresponding to
the minimum frequency of terminal
HDI”
P.523 “The setting corresponding to
the maximum frequency of terminal
HDI”
P.524 “The minimum input frequency
of terminal HDI”
P.525 “The maximum input frequency
of terminal HDI”
P.526 “The HDI filter coefficient”
Parameter
Factory
setting
Setting range
Remarks
522
0%
-100%~100%
----
523
100%
-100%~100%
----
524
0kHz
0~100kHz
----
525
100kHz
0~100kHz
----
526
1
0~31
----
<Setting>
• P.526 (the HDI filter coefficient) is used to filter out the operation frequency jitter generated
by component accuracy, noise or other factors. The larger the set value of P.526 is, the
better the filter ability is, and the slow response will be caused.







































































