





























Parameter Description
Parameters
186
5.8
8
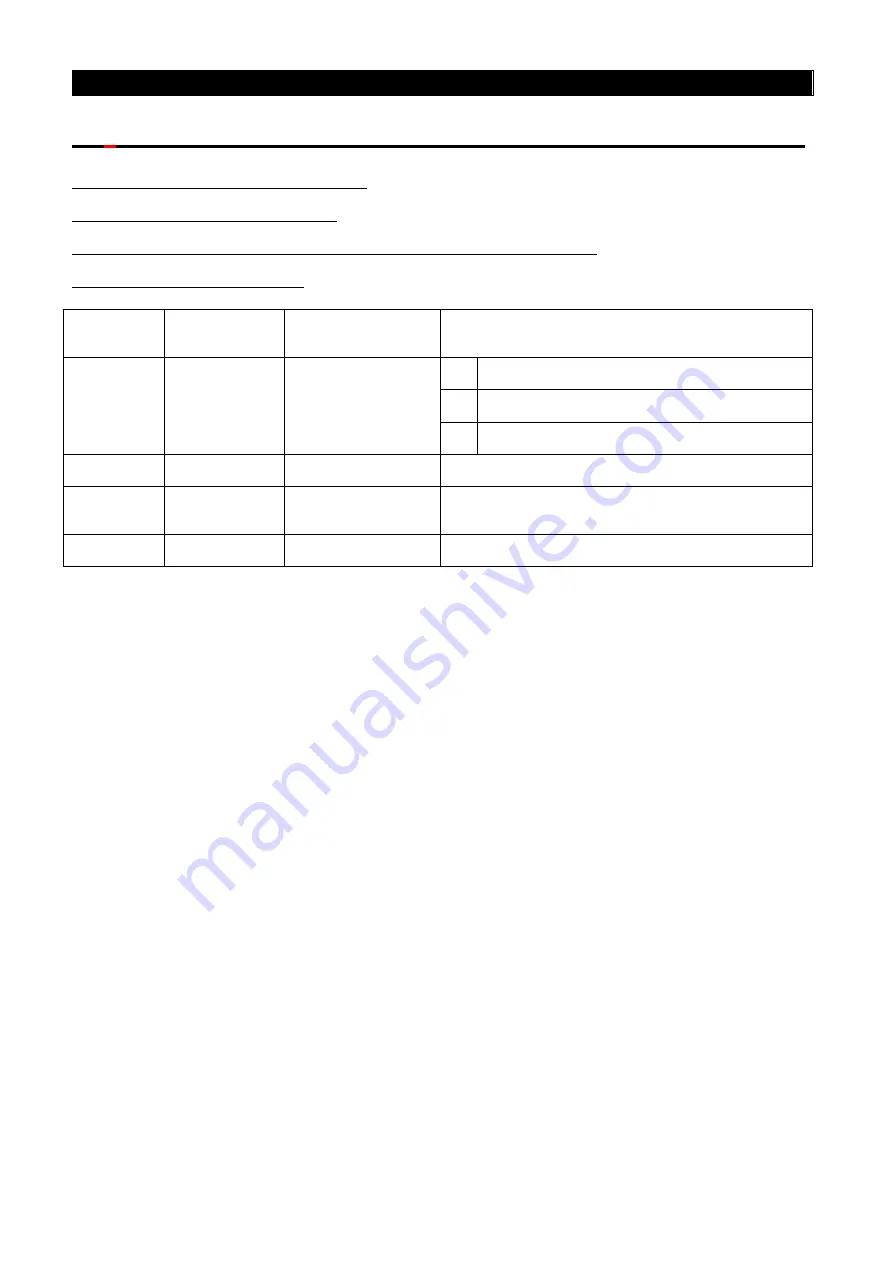
Line Speed Input (P.627~P.630)
P.627 “Line speed input source”
P.628 “Maximum line speed”
P.629 “Minimum line speed for curling radius calculation”
P.630 “Actual line speed”
Parameter
Factory
setting
Setting range
Remarks
627
0
0~2
0 No line speed input
1 The analog value or pulse input
2 The communication setting
628
1000.0m/min 0.1~6500.0m/min The maximum line speed
629
200.0m/min 0.1~6500.0m/min
Minimum line speed for curling radius
calculation
630
---
0~6500.0m/min
Actual line speed
<Setting>
• If the curling radius source selects line speed calculation or tension control mode as the
close-loop speed control, it is required to obtain correct line speed signal. In general, the
convenient way for obtaining line speed is through analog output of operation frequency
of traction (constant speed) inverter. The operation frequency of traction inverter
corresponds with the line speed in linear. It only needs to set the maximum line speed
(P.628) to the corresponding line speed of maximum frequency of operation frequency of
traction (constant speed) inverter.
• P.627 is used to select the way or channel for obtaining line speed.
1) When P.627=0, no line speed is input.
2) When the line speed is obtained through the analog value or pulse input (P.627=1),
the maximum line speed P.628 must be correctly set. The maximum value of analog
or pulse input corresponds with the maximum line speed.
3) When the line speed is obtained through the communication method (P.627=2), it is
set by the communication address 100AH and the setting range is 0.1~6500.0m/min.
• P.629 is used to set the minimum speed for starting calculation of curling radius. When the
inverter detects that the line speed is lower than the value, inverter will stop curling radius
calculation. Correct setting of the value will effectively avoid great deviation of curling
radius calculation when the speed is reduced. In general, the value shall be set to over
20% of maximum line speed.
• P.630 is used to display the actual line speed in real time. The current actual line speed can
be known by the parameter.







































































