Parameter Description
Parameters
191
• In the process of auto roll alternation, when the torque memory enable signal is valid, the
replacing lower roll inverter will control the torque according to the memory torque at first.
And then after the delay time set by P.647, the output torque will be increased according
to the torque increase proportion set by P.646.
5.9
3
Constant line speed mode parameter (P.656)
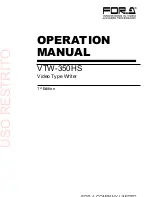
P.656 “Line speed setting source”
Parameter
Factory
setting
Setting
range
Remarks
656
0
0~2
0 The line speed setting is invalid
1 The line speed is obtained by analog value or pulse input
2 The line speed is obtained by communication mode
<Setting>
• The parameter is only valid when P.600=4. P.656 is used to select the method or channel
for acquiring the target speed of constant line speed.
1) When P.656=1, the line speed is obtained by analog value or pulse input. The maximum
line speed P.628 must be set correctly now. The maximum of analog value or pulse input
corresponds to the maximum line speed.
2) When P.656=2, the line speed is obtained by communication mode. It is set by the
communication address 100BH which setting range is 0~6500.0m/min.
5.8
9
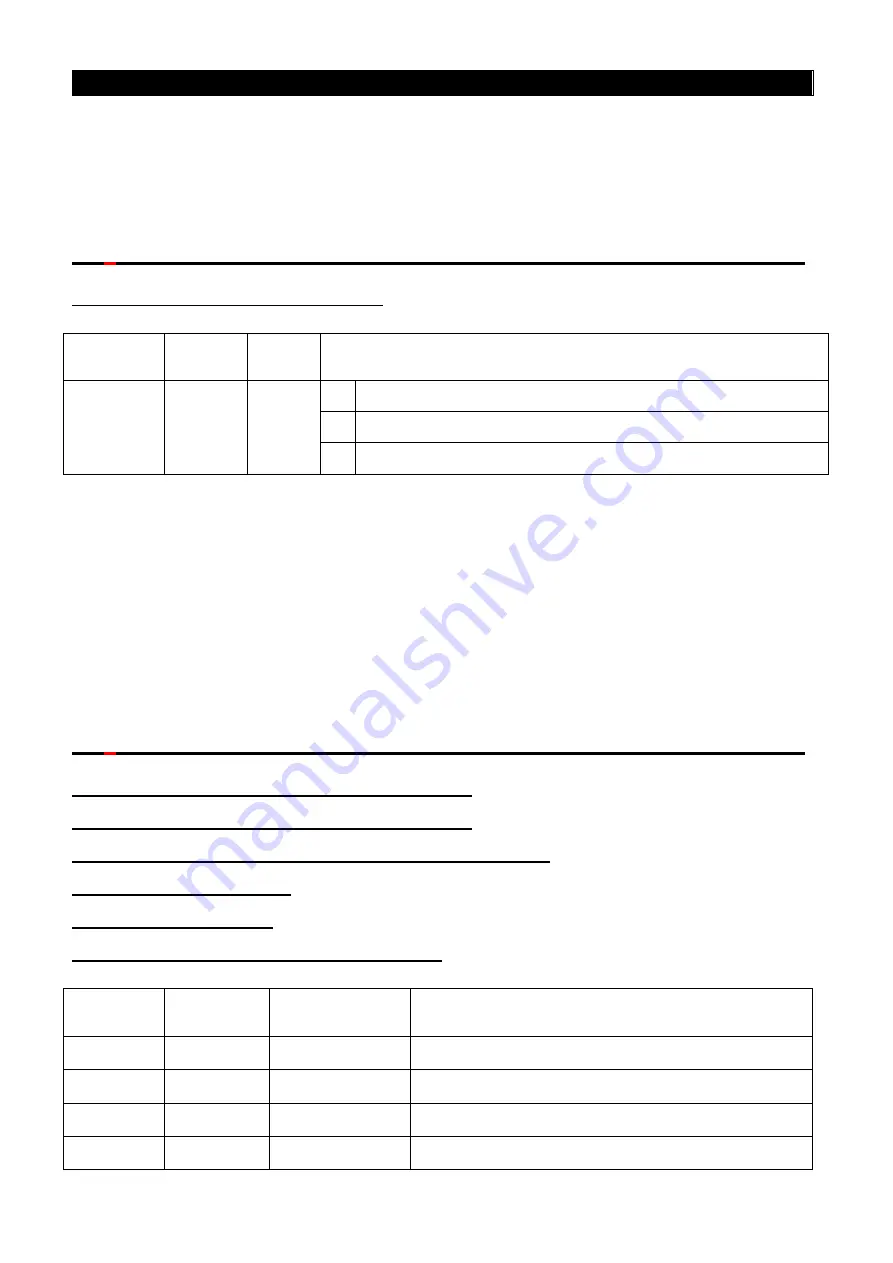
Tension compensation (P.631~P.636)
P.631 “Inertia self learning torque setting 1”
P.632 “Inertia self learning torque setting 2”
P.633 “Mechanical inertia compensation coefficient”
P.634 “Material density”
P.635 “Material width”
P.636 “Fiction compensation coefficient”
Parameter
Factory
setting
Setting range
Remarks
631
30.0%
0.0%~P.632
Inertia self learning torque setting 1
632
60.0%
P.631~100.0% Inertia self learning torque setting 2
633
0
0~65535
Mechanical inertia compensation coefficient
634
0
0~60000kg/m
3
Material density