





























104
4. Parameter description
Parameter
(2). Adjusting the 80 % PID proportion Gain witch setting in (1), increasing PID integration Gain
progressively, until we have the satisfactory movement performance.
(3). To keep PID integration Gain, adjusting PID proportion Gain and observe control process
improvement, if there is any improvement continued until satisfaction. If not, increasing
originally PID proportion Gain, then adjust PID integration Gain to improve control process. So
repeatedly, until find a satisfactory together the PID proportion Gain and PID integration Gain.
(4). Control process do not use PID differential Gain generally, when use PID differential Gain we
can adjust PID proportion Gain and PID integration Gain properly.
And the same steps,
differential time setting repeatedly, until find a satisfactory control process.
note
:
When P.177=2, the keyboard did not display the alarm code, the multi-function output terminal pattern can
detect alarm. The user can operated P.997 or power off to clearn the alarm code.
4.49
Software edition
(
P.188
)
P.188
“
Software edition
”
●
Parameter is not writable and only readable.
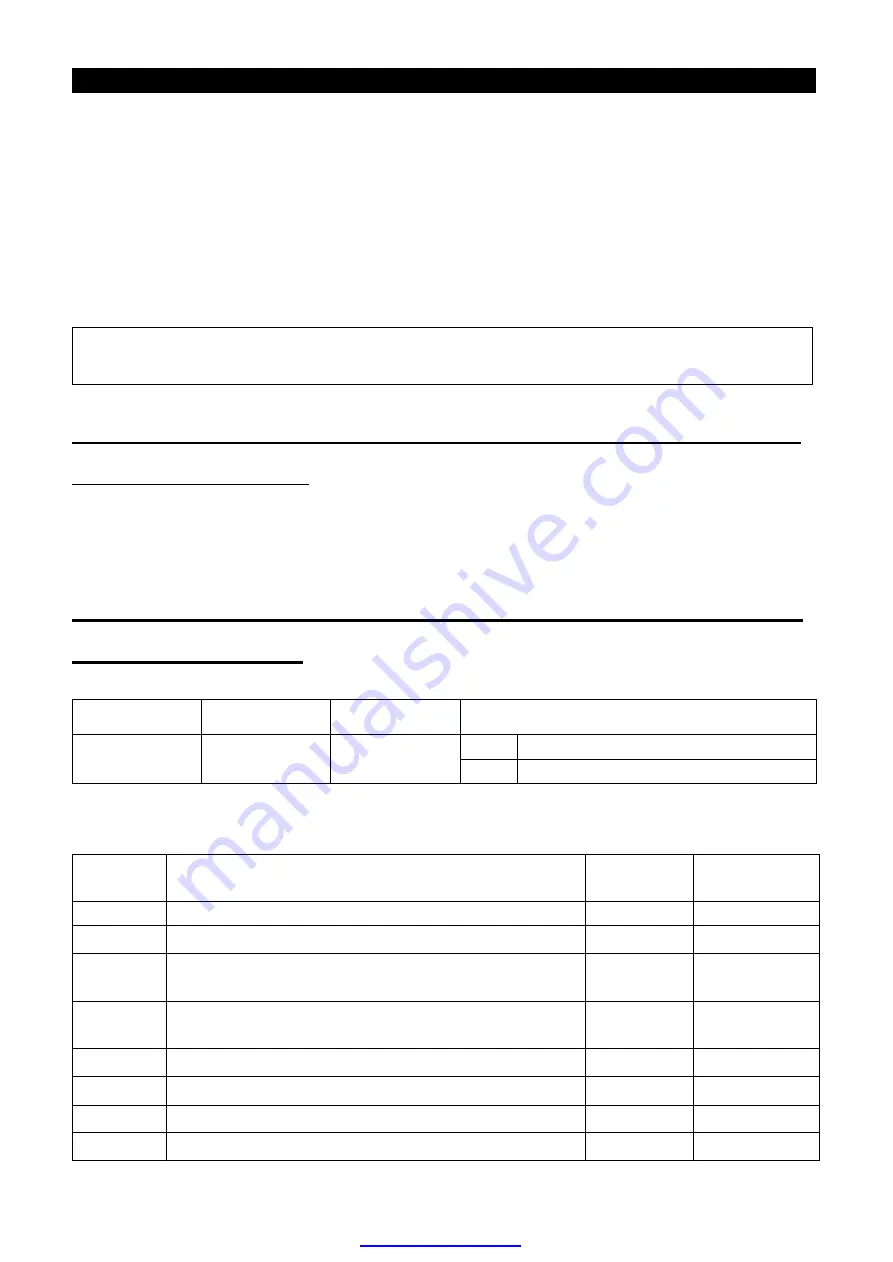
4.50
Default function (P.189)
P.189
“
Default function
”
Parameter
Factory setting
Setting range
Remarks
0
Apply to the 60Hz system
189
1
0
,
1
1
Apply to the 50Hz system
●
The user can select the frequency witch factory setting is 50Hz or 60Hz according to the different
power frequency and the frequency witch motor factory setting. Correlation parameter directions
are in the chart below:
Parameter
Name
Setting range
Minimum
setting unit
P.3
Base frequency
0~400Hz
0.01Hz
P.20
Acceleration/deceleration reference frequency
1~400Hz
0.01Hz
P.38
The maximum output frequency(the target frequency is
set by the input signal across terminal 2-5/panel knob)
1~400Hz
0.01Hz
P.39
The maximum output frequency(the target frequency is
set by the input signal across terminal 4-5)
1~400Hz
0.01Hz
P.55
Frequency monitoring reference
0~400Hz
0.01Hz
P.66
Stall prevention operation reduction starting frequency
0~400Hz
0.01Hz
P.195
Gain of input signal across terminal 2-5
0~400Hz
0.01Hz
P.197
Gain of input signal across terminal 4-5
0~400Hz
0.01Hz
PDF created with pdfFactory trial version







































































