





























69
4. Parameter description
Parameter
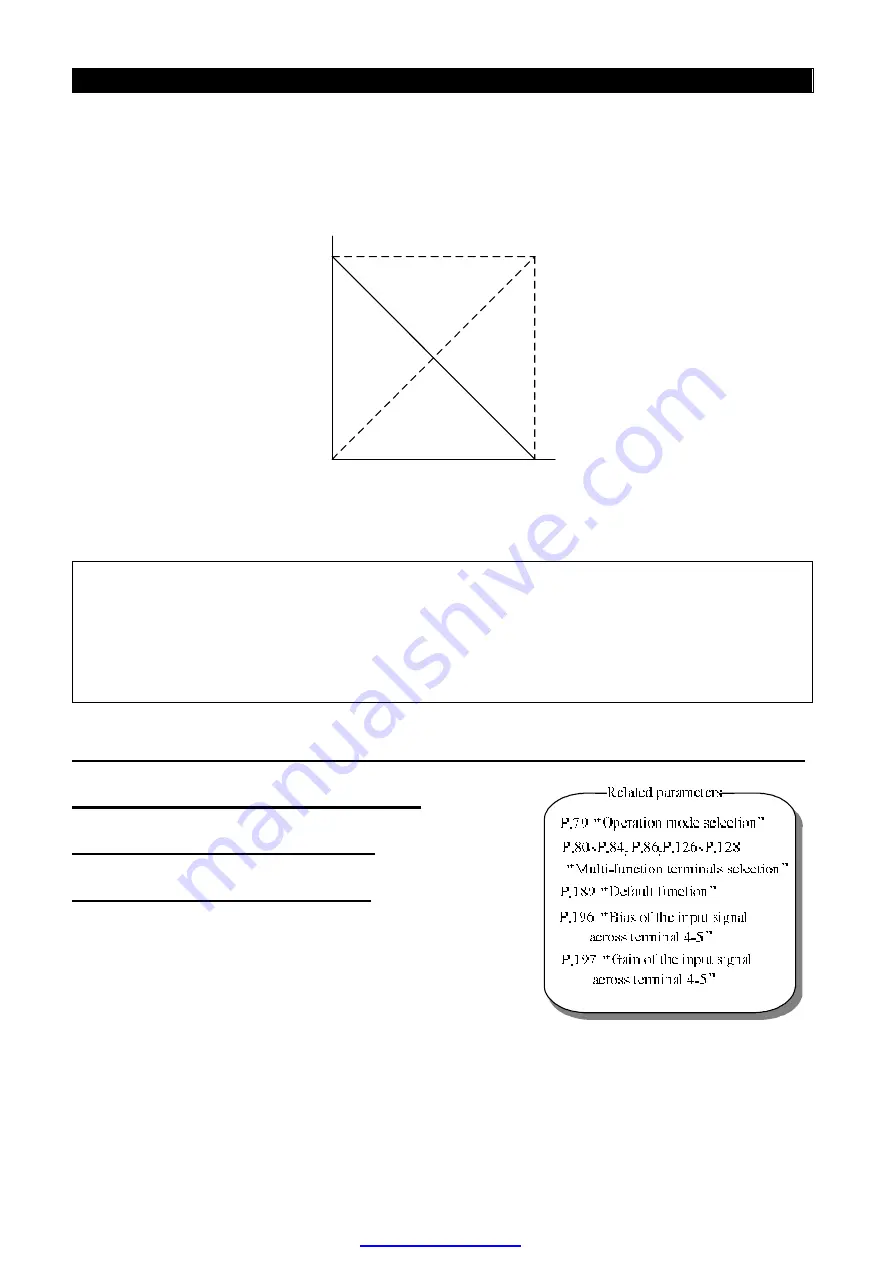
Example 8: In this example, the use of negative slope is shown. Negative slopes are used in
applications for control of pressure, temperature or flow. The sensor that is connected to
the input generates a large signal (10V) at high pressure or flow. With negative slope
settings, the AC motor drive will slow stop the motor. With these settings the AC motor
drive will always run in only one direction (reverse). This can only be changed by
exchanging 2 wires to the motor.
0V
10V
0Hz
60Hz
Negative slope
Parameter setting
:
P.38 = 60.00Hz
,
P.73 = 1
,
P.139 = 100.0%
,
P.140 = 100.0%
,
P.141 = 11
Note: 1. In
‘
external mode
’
,
‘
combined mode 2
’
or
‘
combined mode 4
’
, if RH, RM, RL and REX are all
‘
off
’
, the
inverter target frequency is set by the input signal across terminal 2-5/4-5. If AU is
‘
on
’
, the input signal
across terminal 4-5 has higher priority.
2. RL, RM, RH, REX, AU and RUN referred in this paragraph is the function names of
‘
multi-function
control terminals
’
. For the corresponding function selection and features, please refer to P.80~P.84
、
P.86
、
P.126~P.128. For wiring, please refer to Section 2-5.
4.19
The input signal across terminal 4-5 and the target frequency (P.39)
P.39
“
The maximum output frequency
(the target frequency is set by the
input signal across terminal 4-5)
”
PDF created with pdfFactory trial version







































































