





























92
4. Parameter description
Parameter
4.38
Slip compensation coefficient (P.89)
P.89
“
Slip compensation coefficient
”
●
We can make the speed of the motor, which runs with rated current, to be much closer to the setting
speed by setting this parameter properly.
Parameter
Factory
setting
Setting
range
Remarks
0
slip compensation is forbidden
89
0
0~10
10
compensation value is 3% of the target frequency
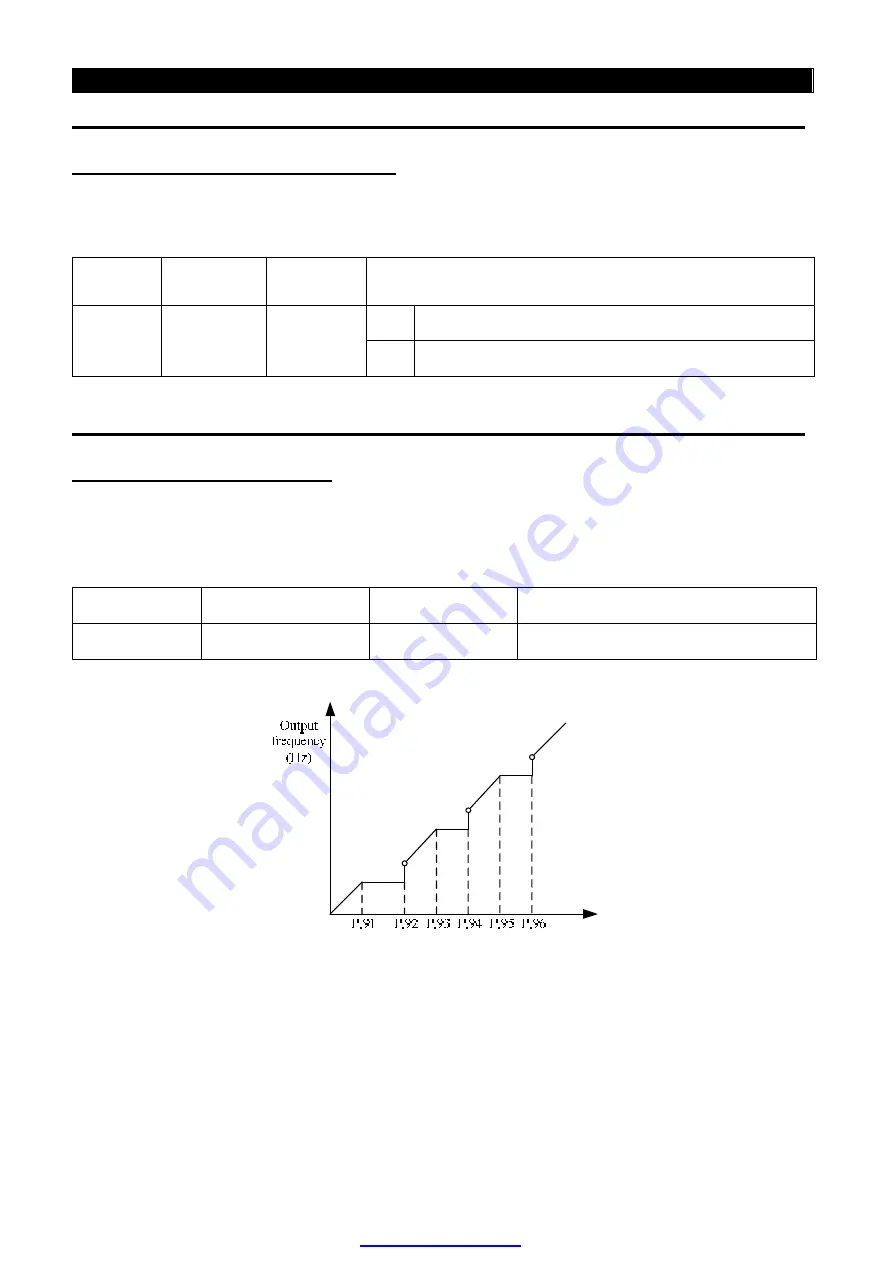
4.39 Frequency jump (P.91~P.96)
P.91~P.96
“
Frequency jump
”
●
To avoid the system mechanical resonance frequency, 3 sets of jump frequencies are presented
namely, the first by P.91 and P.92 , the second by P.93 and P.94 and the last by P.95 and P.96.
Parameter
Factory setting
Setting range
Remarks
91
~
96
Frequency jump
0~400Hz
、
99999
99999, invalid
<Setting>
•
For example: suppose that P.91 = 45 and P.92 = 50
If the target frequency
≦
45Hz, the steady output frequency = the target frequency.
If 45Hz < target frequency
50Hz
≦
, the steady output frequency = 45Hz.
If 50Hz < target frequency, the steady output frequency = the target frequency.
PDF created with pdfFactory trial version







































































