





























40(178)
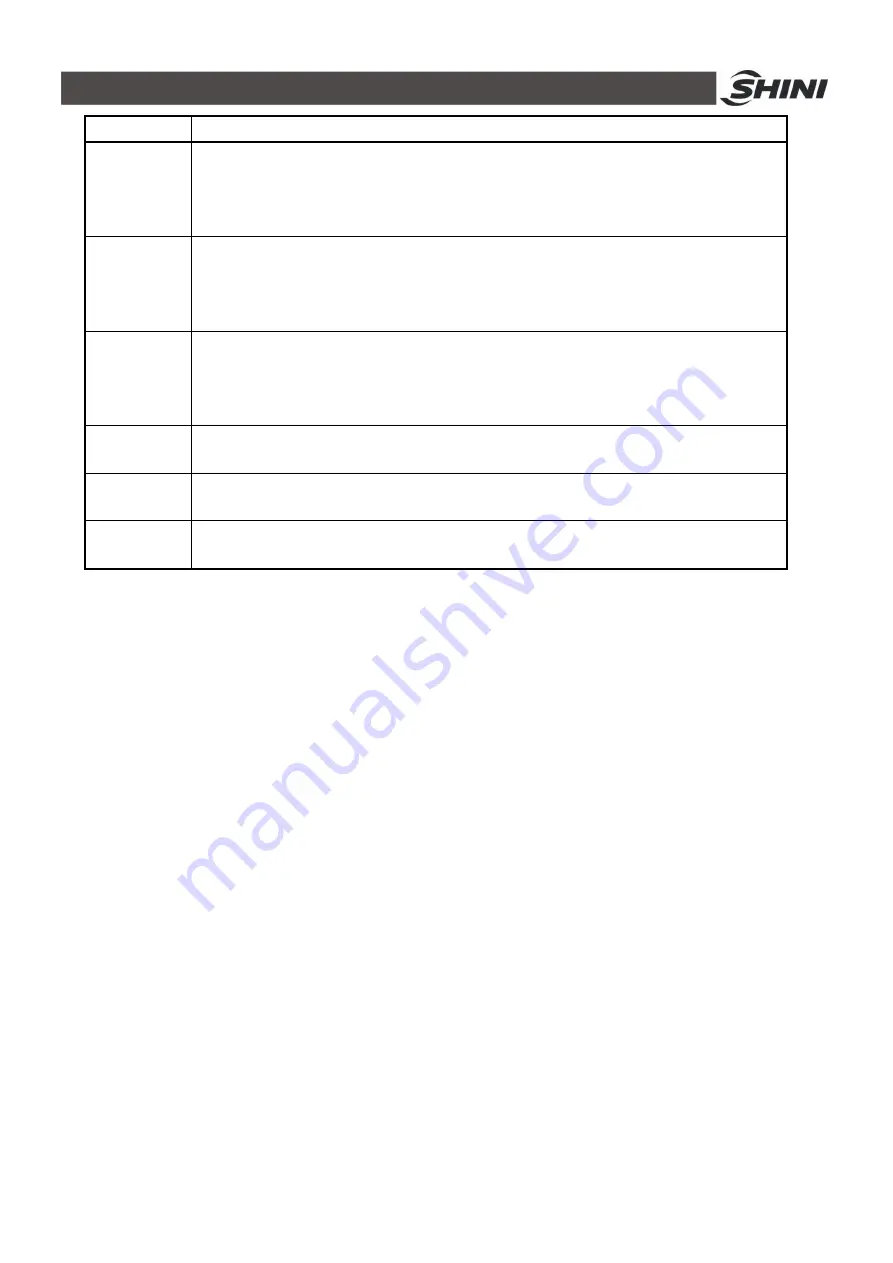
Contact No.
Function
B6
Optional
Enable core pullers 1 to remove the moulding.
HIGH signal when the robot is in position to enable core pullers 1 to remove the
moulding. It is recommended that the signal remains HIGH at least until
”
Core
pullers 1 free for robot to approach
”
signal is given by IMM.(see pin contact No.ZB5)
B7
Optional
Enable movement for the robot to approach freely.
HIGH signal when the robot is in position to enable movement for robot to approach
freely. It is recommended that the signal remains high at least until
”
Core pullers 2
free for robot to approach
”
signal is given by IMM(see pin contact No.ZB7)
B8
Optional
Enable core pullers 2 to remove the moulding.
HIGH signal when the robot is in position to enable core pullers 2 to remove the
moulding. It is recommended that the signal remains HIGH at least until
”
Core
pullers 2 free for robot to approach
”
signal is given by IMM.(see pin contact No.ZB8)
C5
C8
Not fixed by EUROMAP, manufacturer dependent
C6
C7
Reserved for future use by EUROMAP
C9
Supply from IMM
0V (Reference potential)
Summary of Contents for ST3 Series
Page 1: ...ST3 5 Fully Servo Driven Robot User Manual Date Jun 2016 Version V1 5 English ...
Page 2: ...2 178 ...
Page 12: ...12 178 ...
Page 121: ...121 178 7 9 ST3 MT Traverse unit Fig 7 11 ST3 MT traverse unit exploded view ...
Page 123: ...123 178 7 10 ST3 MT Crosswise Unit Fig 7 12 ST3 MT crosswise Unit exploded view ...
Page 125: ...125 178 7 11ST3 MT Main arm unit Fig 7 13 ST3 MT Main arm unit telescopic arm exploded view ...
Page 130: ...130 178 7 13 ST3 LT Crosswise Unit Fig 7 15 ST3 LT crosswise unit exploded view ...
Page 132: ...132 178 7 14 ST3 LT Main arm unit Fig 7 16 ST3 LT main arm unit exploded view ...
Page 150: ...150 178 9 15 ST3 SIGMATEK module board Fig 9 15 ST3 SIGMATEK Module board 1 ...
Page 151: ...151 178 Fig 9 16 ST3 SIGMATEK Module board 2 ...
Page 174: ...174 178 10 19 ST5 SIGMATEK module board Fig 10 21 ST5 SIGMATEK module board 1 ...
Page 175: ...175 178 Fig 10 22 ST5 SIGMATEK module board 2 ...






































































