





























Chapter
3
Operating Instructions
Laser measurement sensor LD-MRS
22
©
SICK AG · Germany · All rights reserved · Subject to change without notice
8012948/ZMQ0/2017-06-09
Product description
By the permanent rotation of the mirror in connection with the laser beam, it is possible to
build a complete profile of the surroundings within the field of view of the LD-MRS. The scan
data of the LD-MRS consist of values for distance, angle, and echo pulse width.
The measurement properties base on
•
time-of-flight measurement,
•
multi-echo capability,
•
multi-layer technology,
•
the scanning range and the relation of angle to range,
•
the angular resolution and the scanning frequency
•
the preprocessed and filtered data.
3.4.2
Time-of-flight measurement
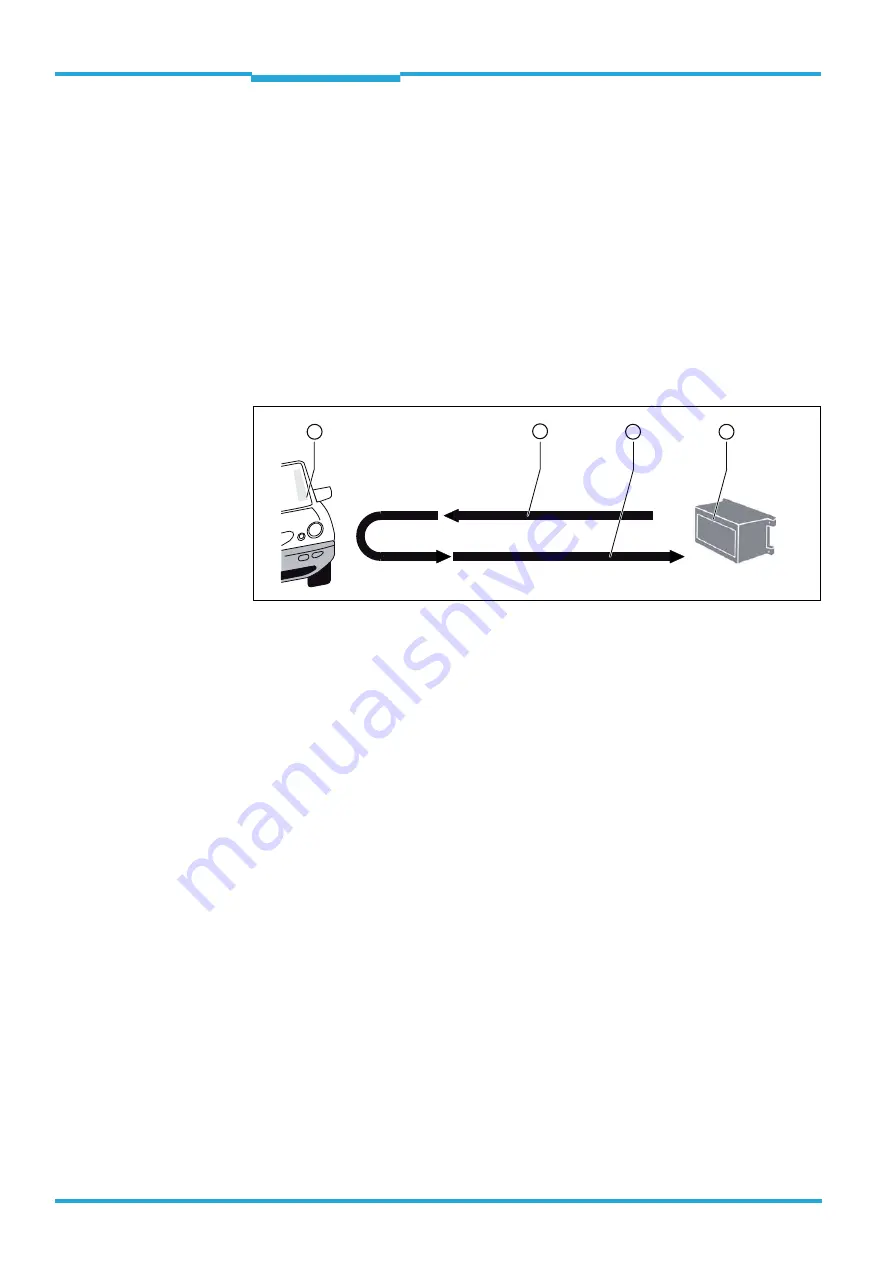
Caption:
1
Object
2
Laser pulse, transmitted
3
Laser pulse, reflected
4
LD-MRS
The laser pulses emitted from the LD-MRS are reflected by the objects in the surroundings.
The LD-MRS collects the laser pulse reflections, processes the information and issues the
data via the Ethernet interface.
The distance is calculated from the time-of-flight of the laser pulse and the speed of light.
The rotating mirror deflects the laser pulses. The angular position of the mirror during de-
flection yields the direction of the detected object.
The combination of these values builds the basis for a complete profile of the surroundings
in the radial scanning range of the LD-MRS.
Fig. 3-2:
Principle of time-of-flight measurement
1
2
3
4







































































