


























Function Blocks
UM353-1B
April
2012
3-70
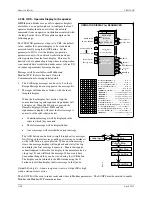
3.2.67 PD - PD Controller
PD
is a proportional only controller with manual reset. It is
one of five controller types that can be used on a one per
loop basis.
Manual reset allows the output of the controller to be set
for a normal operating value (i.e. the desired output when
the process equals setpoint under a given load condition).
Derivative action is provided when the parameter TD is
non-zero. The controller includes an autotune feature that
can be initiated from the operator faceplate using the quick
TUNE feature.
When input A is high (1) the controller will operate in the
normal auto mode and when low (0) causes the controller
output to track the feedback signal to eliminate bumping
the output when switching to auto. This is accomplished by
forcing the reset component R to a value that will keep
(GE+R) equal to the feedback value. When the controller
is switched to auto the value of the reset component will
change back to the manual reset MR value at a rate
determined by the MR TLAG setting. When MRTRCK is
set to YES the manual reset MR will also track the
feedback signal when input A is low.
Input I, when changed from low (0) to high (1) or high to
low, will cause the controller to initialize (i.e. eliminate
any proportional gain action during that scan cycle). This
can be used to prevent bumping the output when changes
are made to the setpoint through a switch block.
t
D S
t
D
D G
S
+ 1
+
+
e
+
-
+
A
PG
t
M R
S
+ 1
1
O1
F
P
S
BLOCK DIAGRAM
Absolute Value
AE
+
+
+/
-
1
-
A
A
uto
I
nitialize
I
S
etpoint
P
rocess
A
bsolute
E
rror
O
utput
F
eedback
Lead
Lag
R
IN
put units
E
ngineering
scaling
IN
put units
E
ngineering
scaling
scaling
inverse scaling
MR
T
PD Controller
R
an
G
e
P
oin
T
e
R
ENG UNITS
.
.
Limit
-3.3 <
O
< 103.3%
r3
P
rocess
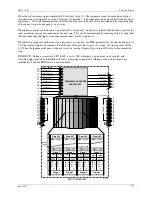
PD CONTROLLER
D G
DIR
ect
ACT
ing
(H)
................................ NO/YES
(NO)
O1
O
utput
CONTROLLER
PD
ESN = 000
P
S
F
A
PD
S
etpoint
F
eedback
A
uto
AE
A
bsolute
E
rror
I N P U T
INPUT A
(H)
......................
loop tag.block tag.output
(null)
E
xec.
S
eq.
N
o.
(H)
............................. 001 to 250
R
T
S C A L E
S C A L E
I
I
I
N
N
N
P
P
P
U
U
U
T
T
T
P
S
F
S
E
N
INPUT F
(H)
.......................
loop tag.block tag.output
(null)
INPUT S
(H)
.......................
loop tag.block tag.output
(null)
INPUT P
(H)
.......................
loop tag.block tag.output
(null)
MIN
imum
SCALE
(H)
.................................. Real
(0.0)
D
erivative
G
ain
(S)
........................ 1.00 to 30.00
(10.00)
T
ime -
D
erivative
(S)
............. 0.00 to 100.00 min
(0.00)
A
P
R
R
an
G
e
P
oin
T
e
R
(S)
....................
loop tag.block tag (null)
A C T
R
I
D
T D
G
M I N
M A X
E N G U N I T S
MAX
imum
SCALE
(H)
................................. Real
(100.0)
ENG
ineering
UNITS
(S)
.................6 ASCII Char
(PRCT)
I
I
nitialize
P
roportional
G
ain
(S)
................... 0.001 to 100.0
(1.000)
P G
INPUT I
(H)
........................
loop tag.block tag.output
(null)
I N P U T
I
A U T O T U N E
AUTOTUNE
(S)
................................... NO/YES
(YES)
D E V
%
% DEV
iation
during Autotune
(S)
.... AUTO, 2.5 to 25.0
(AUTO)
%
H Y S
% HYS
teresis
during Autotune
(S)
.. AUTO, 0.5 to 10.0
(AUTO)
S T E P
%
%
output
STEP
on first Autotune
(S)
............ 5% to 40% (10)
A T
D Y N A M
AT DYNAM
ic settings
(S)
.... Fast, Medium, Slow
(M)
A T
R E S E T
AT RESET
(S)
.................................... NO/YES
(YES)
AW
A
T
W
arning
A T
T
S
O
P
POST A
utotune
T
ransfer
(S)
................ NO/YES
(NO)
M
M R
R
T L A G
T R C K
M R
M
anual
R
eset
(S)
......................... 0.00 to 100.00
(0.00)
M
anual
R
eset
T
ime
LAG
(S)
. 0.001 to 4000 min
(0.010)
M
anual
R
est
TRACK
ing
(S)
.................. NO/YES
(NO)
P
P
D
D
ecimal
P
oint
P
osition (preferred)
(S)
........... 0.0.0.0.0.0 (0.0)
R
ange
R
OR
O
utput
R
ange
Summary of Contents for 353
Page 12: ...Contents UM353 1B x April 2012 ...
Page 22: ...Introduction UM353 1B April 2012 1 10 ...
Page 30: ...Configuration Overview UM353 1B April 2012 2 8 ...
Page 122: ...Function Blocks UM353 1B April 2012 3 92 ...
Page 168: ...Data Mapping UM353 1B April 2012 6 28 ...
Page 204: ...Controller and System Test UM353 1B April 2012 9 8 ...
Page 222: ...Calibration UM353 1B April 2012 11 4 ...
Page 226: ...Circuit Description UM353 1B April 2012 12 4 ...
Page 238: ...Model Designation and Specifications UM353 1B April 2012 13 12 EC Declaration of Conformity ...
Page 240: ...Model Designation and Specifications UM353 1B April 2012 13 14 ...
Page 244: ...Abbreviations And Acronyms UM353 1B 14 4 April 2012 ...







































































