



























67 / 92
Siemens
Actuators SAX.., SAY.., SAV.., SAL.. for valves
CE1P4040en
Building Technologies
Functions and control
2018-12-05
4.13 Communicating actuators Modbus RTU
4.13.1 Detection of valve seat
The actuators feature force-dependent valve seat detection. After calibration, the
exact valve stroke is filed in the actuator’s memory. When the actuator reaches the
respective end of stroke, it does not hit the valve’s seat at full speed, but stops for 5
seconds at about 1% before the stored position is reached. If the positioning signal
stays at 0% or 100%, the actuator travels to the calculated end position at reduced
positioning speed and builds up the required nominal force.
This function extends the actuator’s service life since the dynamic forces are
reduced when approaching the valve seat and there will be less strain on the gear
train.
In addition, the actuator’s oscillations in the case of instable control are
suppressed.
If no force is built up in the calculated end position (e.g. in the event of temperature
effects for instance), the actuator continues to operate at a reduced positioning
speed until the nominal positioning force is restored. This ensures that the valve
always fully closes.
After a power failure, valve seat identification is not active – the actuators without
fail safe function define their stroke position upon return of power at 50% and
automatically set their internal setpoint in register 1 to the startup setpoint (register
516). The actuator closes at this setting. There is a short-term deviation between
the setpoint and the internal stroke position.
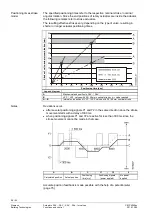
When the valve plug reaches each seat for the first time, the actuator readjusts its
stroke mode.
Setpoint prior to power outage 35%, no manual adjustment during the power
outage. Internal stroke position value after return of power 50%. Internal setpoint
after return of power equal to startup setpoint (register 516, here 0%). The actuator
moves 35% in the direction of "Retract actuator stem" and reaches the valve seat
(if the setpoint has not been changed in the meantime). The internal stroke position
is set to 0%.
The actuator now follows the changed valve stroke position effective immediately.
4.13.2 Detection of foreign bodies
The actuator detects when the valve is clogged and adjusts its operational
behavior accordingly to prevent damage to itself or the valve.
If the actuator hits an obstacle within the calibrated stroke and is not able to
overcome it with its nominal positioning force, it stores the position at which the
obstacle was hit. Depending on the direction of travel, as …
·
"Lower limit of valve clogging", if the clogging was detected when
traveling in the direction of "Actuator’s stem retracting".
·
"Upper limit of valve clogging", if the clogging was detected when
traveling in the direction of "Actuator’s stem extending".
Now, the actuator status LED blinks green and the actuator only follows the
positioning signal between the positions "Actuator’s stem retracted" and "Upper
limit of valve clogging" or "Actuator’s stem extended" and "Lower limit of valve
clogging".
After detection of clogging, 3 attempts are made to overcome clogging by traveling
about 15% in the opposite direction and then trying again to overcome the position
of clogging. If the attempts made are unsuccessful, the actuator continues to follow
Example







































































