





























Communications
configuring
System- and communication configuring D7-SYS - SIMADYN D
3-163
Edition 12.2003
3.17.3
Applications and modes which should be set
Various SL master, dispatcher and slave modes can be set by
appropriately configuring SIMOLINK.
For
position-synchronous
actual value sensing and setpoint input (e.g.
“virtual shaft” for printing or packaging machines), the
jitter-free
(equidistant in time) modes should be set
•
External mode (Mode 4),
•
Interrupt automatic mode (Mode 3) and
•
External cyclic mode (Mode 5)
•
Cyclic automatic mode (mode 10) and
(refer to the SIMOLINK function block description @SL).
For the mode 3, 5 and 10, the telegram data of the previous bus cycle are
processed in parallel to the bus cycle and equidistant SIMOLINK
telegrams are sent and received. This allows the shortest SIMOLINK
cycles to be configured. Ideally, this technique is suitable for applications
with “
virtual shaft with values which uniformly change
”, which are
required, for example, for printing machines.
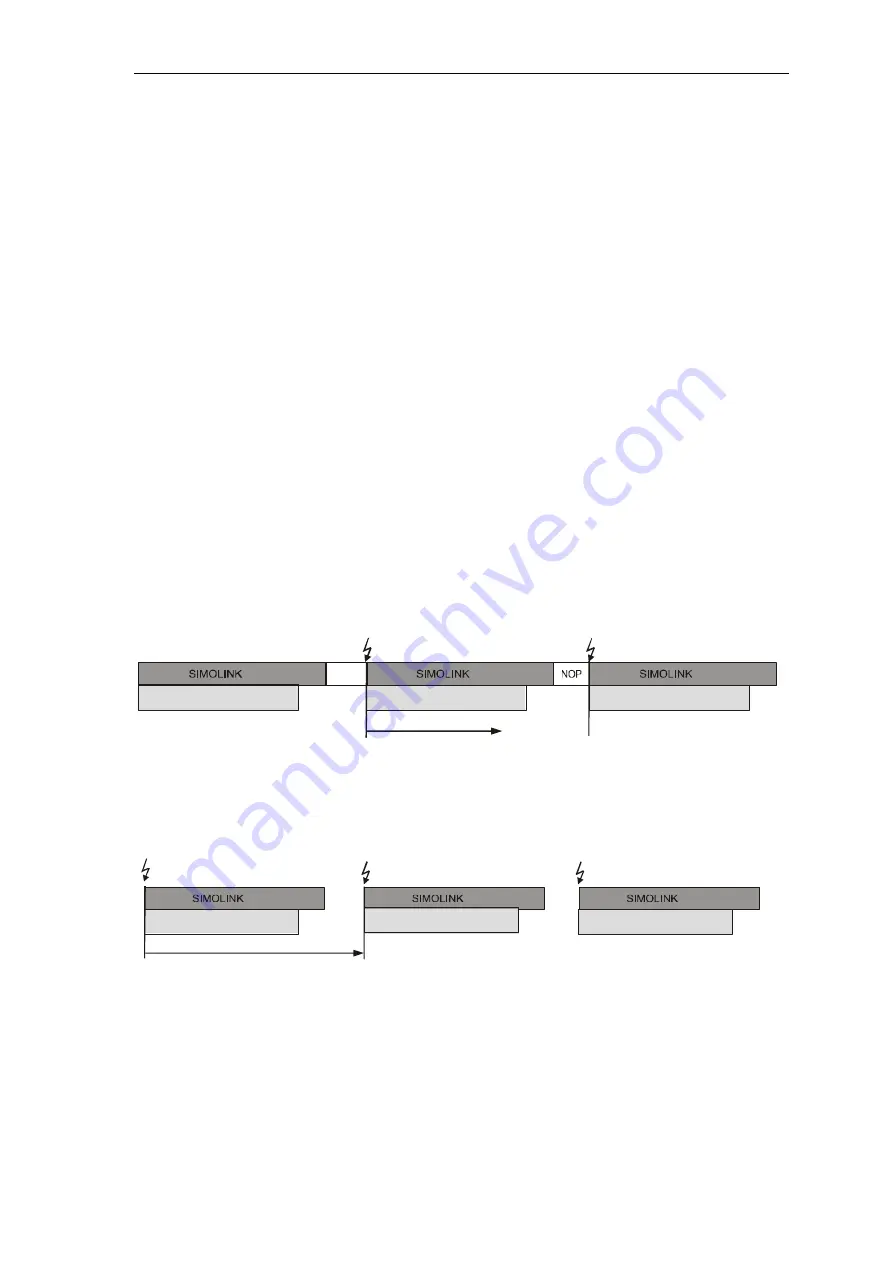
The operating modes
automatic mode
(Mode 3) with processing in an
interrupt task Ix should be used for jitter-free synchronization of the drives
NOP
Interrupt task Ix
SYNC Telegram
SYNC Telegram
cycle
cycle
cycle
Processing time of the
SIMOLINK blocks
Processing time of the
SIMOLINK blocks
Processing time of the
SIMOLINK blocks
Fig. 3-54
Automatic mode (Mode 3)
and
external-cyclic mode
(Mode 5) with synchronization to the basic
sampling time T0.
T0 interrupt
T0 interrupt
T0 interrupt
Cyclic task T1 = T0
cycle
cycle
cycle
Processing time of the
SIMOLINK blocks
Processing time of the
SIMOLINK blocks
Processing time of the
SIMOLINK blocks
Fig. 3-55
External-cyclic mode (Mode 5)
The sampling time should be selected somewhat higher than the
bus cycle time.
Synchronized data
send,
1 cycle deadtime







































































