





























Communications configuring
3-164
System- and communication configuring D7-SYS - SIMADYN D
Edition 12.2003
The external-cyclic mode offers the advantage that the processor
hardware of two SIMOLINK rings can be synchronized to the (common)
base sampling time T0.
NOP
cyclic Task Tx
SYNC Telegram
SYNC Telegram
cycle
cycle
cycle
Processing time of the
SIMOLINK blocks
Processing time of the
SIMOLINK blocks
Processing time of the
SIMOLINK blocks
Bild 3-56
Cyclic automatik-mode (Mode 10)
The cyclic-automatic-mode 10 offers the advantage to place the function
block configuration in cyklic tasks, in opposed to mode 3.
The jitter-free SL-master mode, external-mode is best suited for
synchronous actual value sensing with the fastest processing (minimum
deadtime). This means, that it can be used as “
virtual shaft with
dynamically changing values
”, for example, for packaging machines.
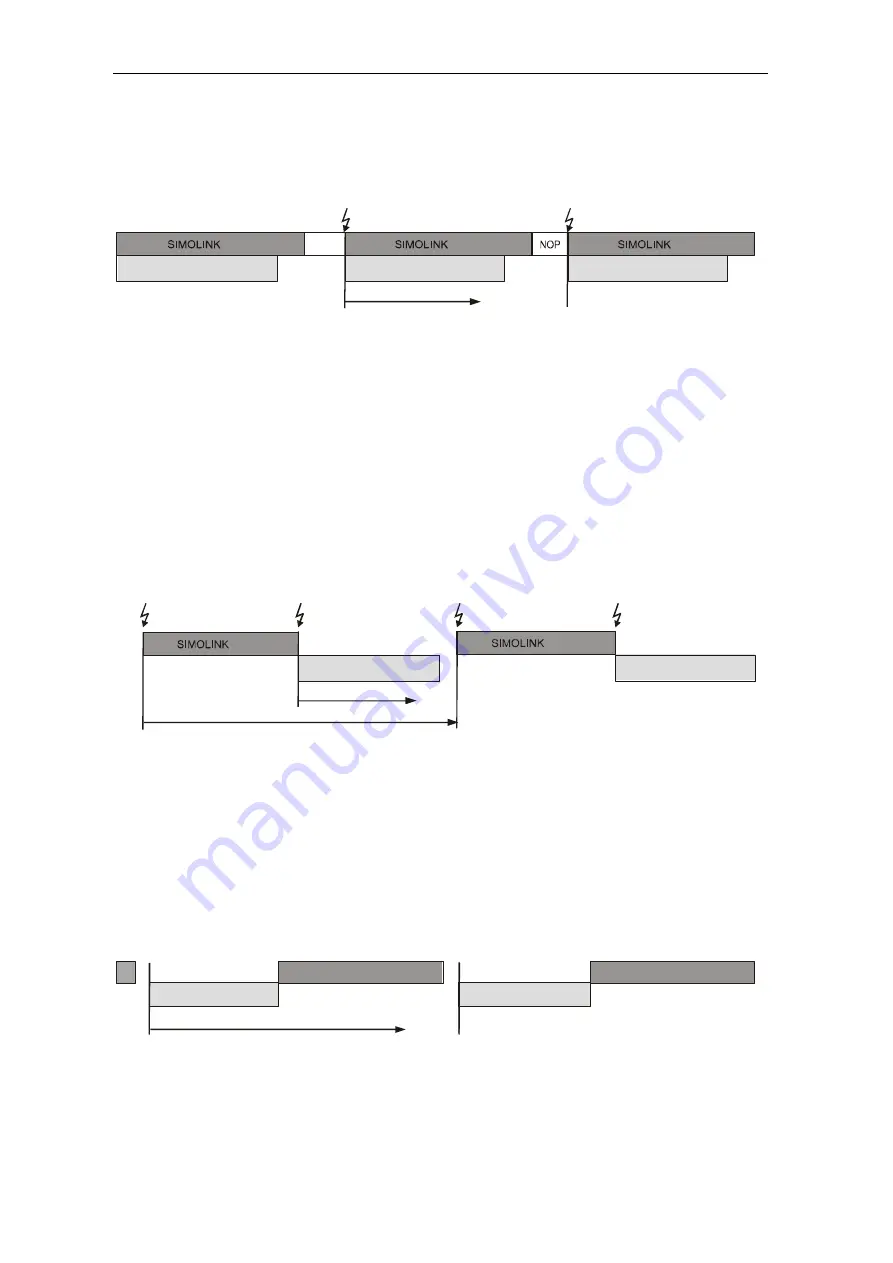
In the
external mode
(Mode 4) the SIMOLINK cycle is synchronized to
the base sampling time T0. The SIMOLINK blocks are immediately
executed in the configured interrupt task Ix when the SYNC telegram is
subsequently received.
Basic clock cycle T0
SYNC telegram
T0 interrupt
T0 Interrupt
SYNC telegram
cycle
cycle
Interrupt task Ix
Processing time of the
SIMOLINK blocks
Processing time of the
SIMOLINK blocks
Fig. 3-57
External-mode (Mode 4)
The base sampling time T0 setting must correspond as a minimum
to the bus cycle time plus the interrupt task processing time.
If data are to be transferred to other nodes after the calculation with
minimum deadtime, then either the non-synchronous mode or the timer
mode is used.
For the
non-synchronous mode
(Mode 1), data is directly output after
the SIMOLINK blocks have been processed in a cyclic task Tx.
Processing time of the
SIMOLINK blocks
SIMOLINK cycle
SIMOLINK cycle
Cyclic task Tx
Processing time of the
SIMOLINK blocks
Fig. 3-58
Non-synchronous-mode (Mode 1)
Fastest sensing,
synchronous
Fastest data send,
non-synchronous







































































